2. 正运动学
上一章我们只控一个关节。这一章把关节串起来——给出 n 个关节角,求末端执行器在世界坐标系下的 6-DoF 位姿。正运动学是逆运动学、步态规划、视觉-动作对齐的前提。
本章目标
- 能写出齐次变换矩阵
T = [R p; 0 1] - 能从 URDF / MJCF 描述里读出每个关节的父坐标系与旋转轴
- 能用 Python + NumPy 实现一个 3-DoF 机械臂的 FK,并在 MuJoCo 里验证末端位置误差 < 1e-6
- 能画出雅可比矩阵(为 §3 逆解做准备)
前置阅读
- 第 1 章 执行器与 PD 控制
- 想更直观理解,可以点击 交互模式 学习
2.1 机械臂组成
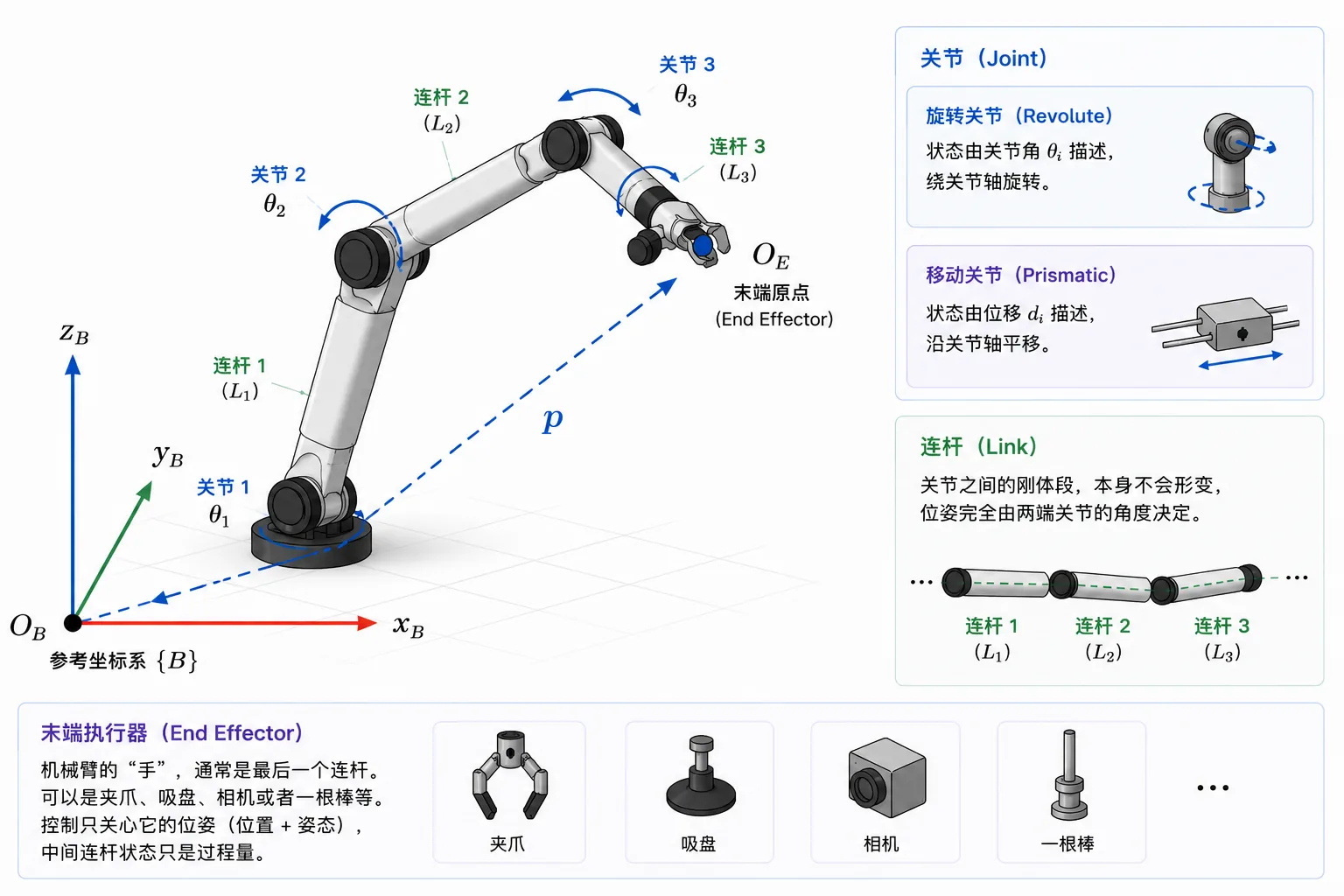
在推导出正运动学公式之前,我们先铺垫一些概念,首先是机械臂的运动组成。机械臂的运动由两个关键元素组成:关节(Joint)和连杆(Link)。此外还有一个特殊的连杆叫末端执行器(End Effector),它是机械臂的"手",在拓扑上是最后一个连杆,但功能特殊,所以单独命名。
- 关节(Joint):连接相邻两个连杆,提供一个或多个自由度(DoF)。最常见的是旋转关节(revolute joint),提供一个绕固定轴的转角
;另一类是移动关节(prismatic joint),提供一个沿固定轴的位移 。一个 -DoF 机械臂的状态由所有关节变量构成的向量 完全决定。 - 连杆(Link):相邻两关节之间的刚体段,自身位姿仅由父关节决定,与子关节的状态无关。FK 计算中,连杆的作用是给出"父关节到子关节"的固定齐次变换,与几何外形(长度、惯量、碰撞体)无关。
此外,还有两个特殊的连杆:末端执行器(End Effector)和基座(Base)。末端执行器(简称末端)是机械臂的"手",在拓扑上是最后一个连杆,但功能特殊,所以单独命名;基座是机械臂的根部,通常固定在地面或工作台上,也是一个特殊的连杆,虽然它没有父关节。三者在串联链条中的关系如 图 1 所示。
通常我们关心末端的运动状态(位置、姿态、位姿),而末端的状态完全由所有关节的状态决定。正运动学(Forward Kinematics, FK)就是这样一个函数:输入是
2.2 坐标系
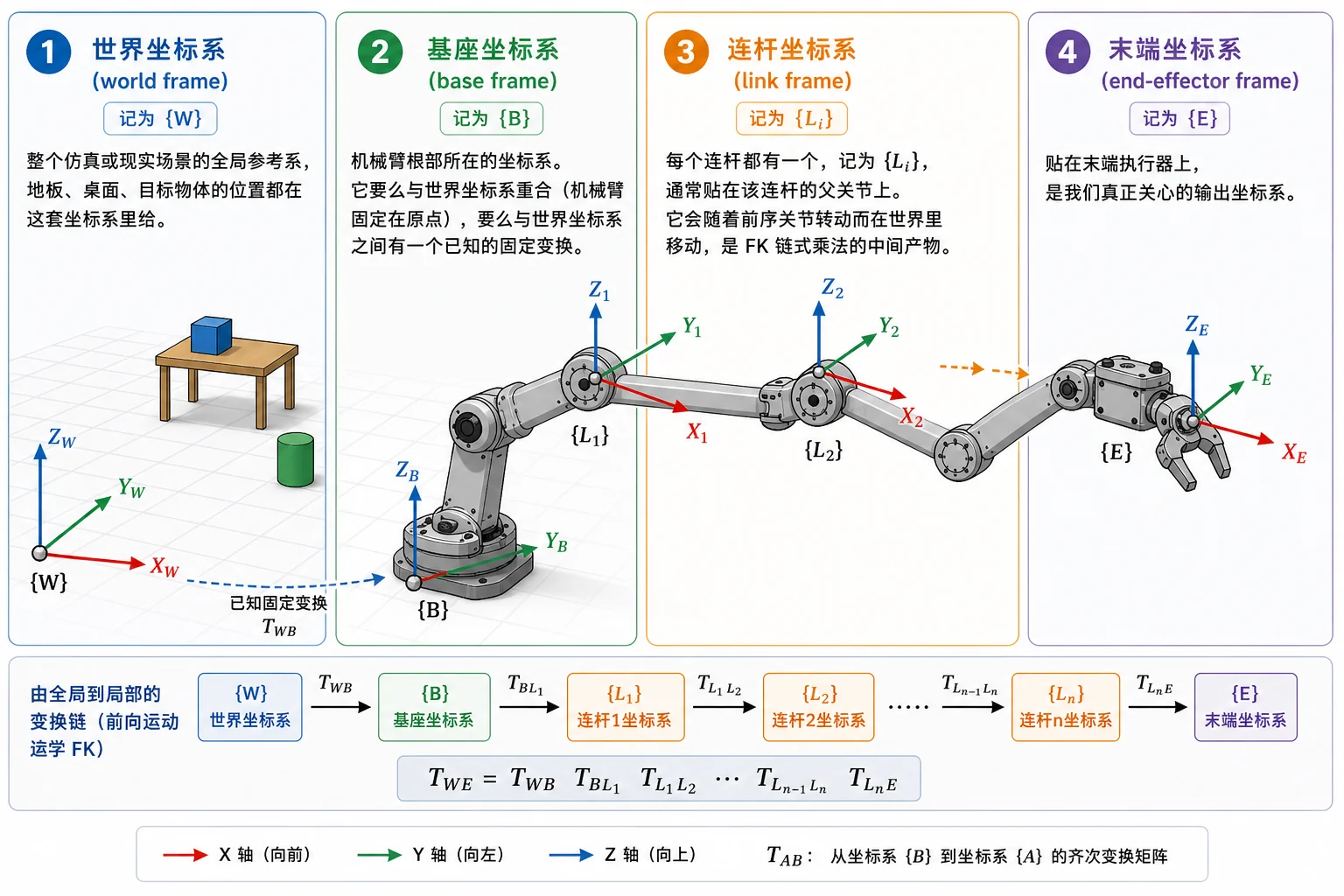
要表达"末端在哪、朝哪",必须先有参照物——坐标系就是这个参照物。机械臂里常见的坐标系有四种,按"由全局到局部"的顺序排列:
- 世界坐标系(world frame):通常记为
,是整个仿真或现实场景的全局参考系,地板、桌面、目标物体的位置都在这套坐标系里给。 - 基座坐标系(base frame):通常记为
,是机械臂根部所在的坐标系。它要么与世界坐标系重合(机械臂固定在原点),要么与世界坐标系之间有一个已知的固定变换(机械臂装在移动底盘或工作台上)。 - 连杆坐标系(link frame):每个连杆都有一个,记为
,通常贴在该连杆的父关节上。它会随着前序关节转动而在世界里移动,是 FK 链式乘法的中间产物。 - 末端坐标系(end-effector frame):记为
,贴在末端执行器上,是我们真正关心的输出坐标系。
这些坐标系会沿运动链逐级传递,整体关系如 图 2 所示。
正运动学的核心就是把末端坐标系
2.3 位姿
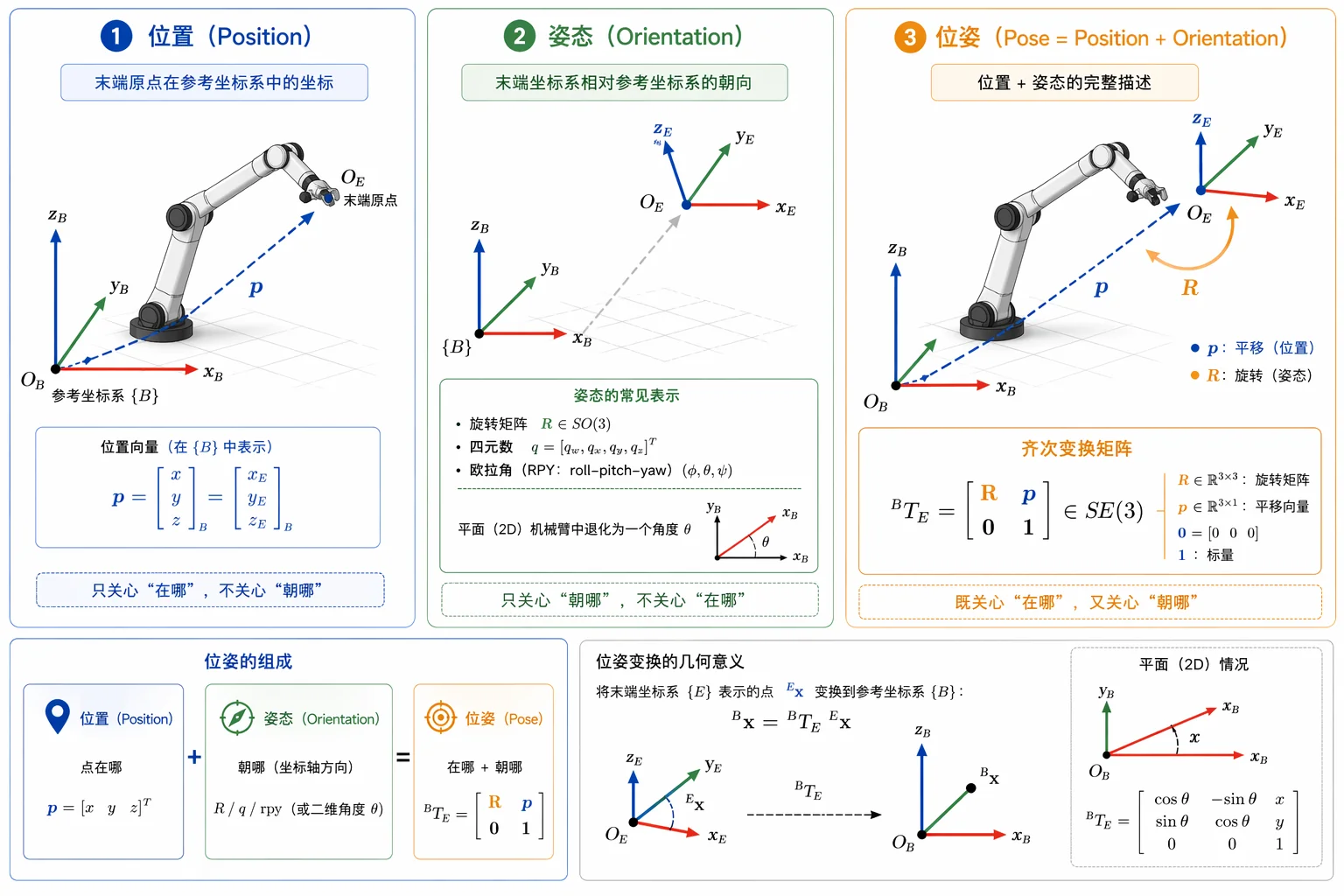
有了坐标系,我们就可以描述末端执行器的状态了。末端的状态通常用位置(position)和姿态(orientation)来刻画,其中位置刻画末端原点的坐标,即表示末端"在哪",姿态刻画末端坐标轴的朝向,即表示末端"朝哪"。把两者合并到同一个变换中,就得到了位姿(pose),是刚体状态的完整描述。
位置通常用一个三维向量
姿态描述末端坐标系相对参考坐标系的旋转状态,相比位置,表达方式更多样、也更复杂,常见有三种:
- 旋转矩阵(Rotation Matrix):记为
,是满足 与 的正交矩阵。它的三列对应末端坐标系 三个坐标轴在参考坐标系 下的单位向量,因此 既给出旋转的代数表示,又能直接读出"末端朝哪"。优点是合成只需矩阵乘、与齐次变换天然兼容;缺点是用 9 个数表示 3 个自由度,参数冗余。 - 欧拉角(Euler Angles):用绕三个轴依次旋转的角度组合表示姿态,最常见的是 Roll(翻滚)、Pitch(俯仰)、Yaw(偏航)三个角。只需 3 个数、对人类直观;但当两个旋转轴对齐时会发生万向节死锁(gimbal lock),瞬时丢失一个自由度,因此不适合做积分或插值。
- 四元数(Quaternion):记为
且 ,用 4 个实数表示旋转。表达不直观,但全空间无奇异、数值稳定、插值平滑,是仿真器(MuJoCo / Isaac)和控制器内部最常用的姿态表示。
把位置
其中
正运动学(Forward Kinematics, FK)就是这样一个函数,如式
其中
2.4 齐次变换矩阵
本节我们详细展开一下齐次变换矩阵,即式
上一节末尾要把相邻坐标系之间的变换写成代数。这一节先用 图 4 建立直觉,再用几段代码验证:旋转做什么、平移做什么、合起来又是什么——读完会自然得到 §2.2 里那个
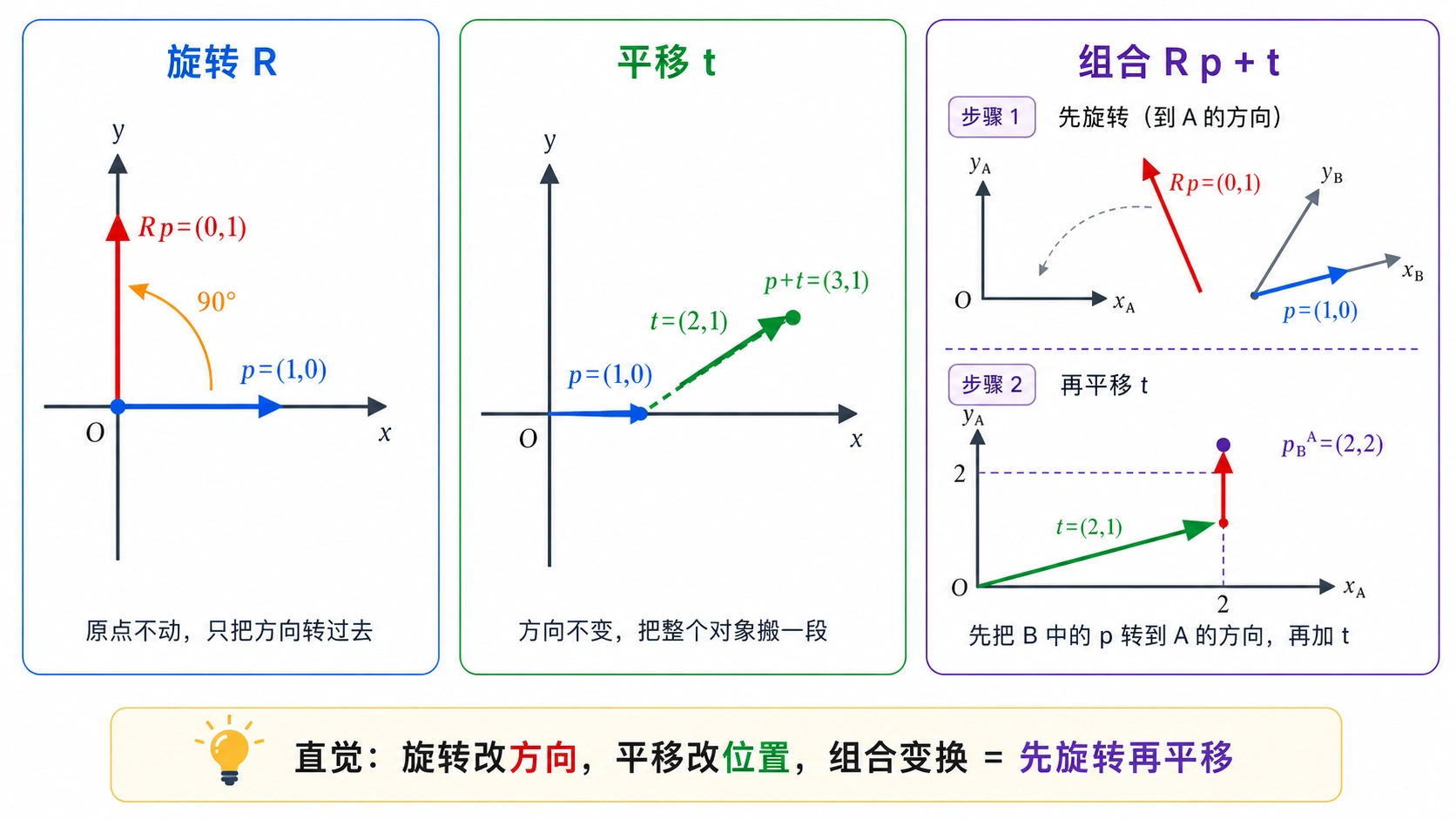
旋转:让向量绕原点转。 二维平面里一个点
import numpy as np
def rot2(theta):
c, s = np.cos(theta), np.sin(theta)
return np.array([[c, -s], [s, c]])
p = np.array([1.0, 0.0])
print(rot2(np.deg2rad(90)) @ p) # [0., 1.] 转到 y 轴
print(rot2(np.deg2rad(180)) @ p) # [-1., 0.] 转到 -x 轴
旋转只改变方向,不改变长度,原点也保持不动——单凭旋转没办法把
平移:整体搬一段距离。 平移在代数上就是加一个向量
t = np.array([2.0, 1.0])
print(p + t) # [3., 1.]
特征反过来:只改变位置,不改变方向。两件事合起来,足以描述刚体在平面里能做的全部运动——绕一个点转 + 整体挪一段。
组合:先旋转再平移。 写成代数就是课本里常见的形式:
也就是:坐标系
R = rot2(np.deg2rad(90)) # B 相对 A 转了 90°
t = np.array([2.0, 1.0]) # B 原点在 A 里的位置
p_B = np.array([1.0, 0.0]) # 这个点在 B 里的坐标
p_A = R @ p_B + t
print(p_A) # [2., 2.]
问题。 旋转是矩阵乘法,平移是向量加法,两件事拼不到同一个运算里。一旦串起来三个连杆,就会写成
齐次形式:把两件事压成一个矩阵乘。 给点补一维,把二维点
def make_T(R, t):
T = np.eye(3)
T[:2, :2] = R
T[:2, 2] = t
return T
T = make_T(rot2(np.deg2rad(90)), np.array([2.0, 1.0]))
p_B_h = np.array([1.0, 0.0, 1.0]) # 末尾的 1 是齐次坐标
p_A_h = T @ p_B_h
print(p_A_h) # [2., 2., 1.] 和上面手算一致
3D 同样处理:点变成
它把"位置
两个关键性质:
- 可以一路乘下去。
个关节串起来的末端位姿就是 ,这一乘法正是 FK 的全部计算内容。 - 可逆且解析可写。
,把世界坐标系下的目标搬到末端坐标系时会反复用到。
2.5 运动链
把基座、各连杆、末端执行器按"父→子"顺序连成一棵树(机械臂是单链,腿 / 手是分叉),就得到运动链(kinematic chain)。运动链上每条边对应一个关节,每个关节贡献一个齐次变换;FK 就是沿着这条链把所有齐次变换乘起来,如式
剩下的问题只有一个:怎么写出
2.5.1 DH 参数
DH 参数(Denavit-Hartenberg parameters)是一种给串联机械臂选取连杆坐标系的约定。它的目标不是描述连杆的几何外形,而是把相邻两个连杆坐标系之间的刚体变换压缩成四个标量参数。给定第
这里的
这四个参数的几何含义如 图 5 所示。
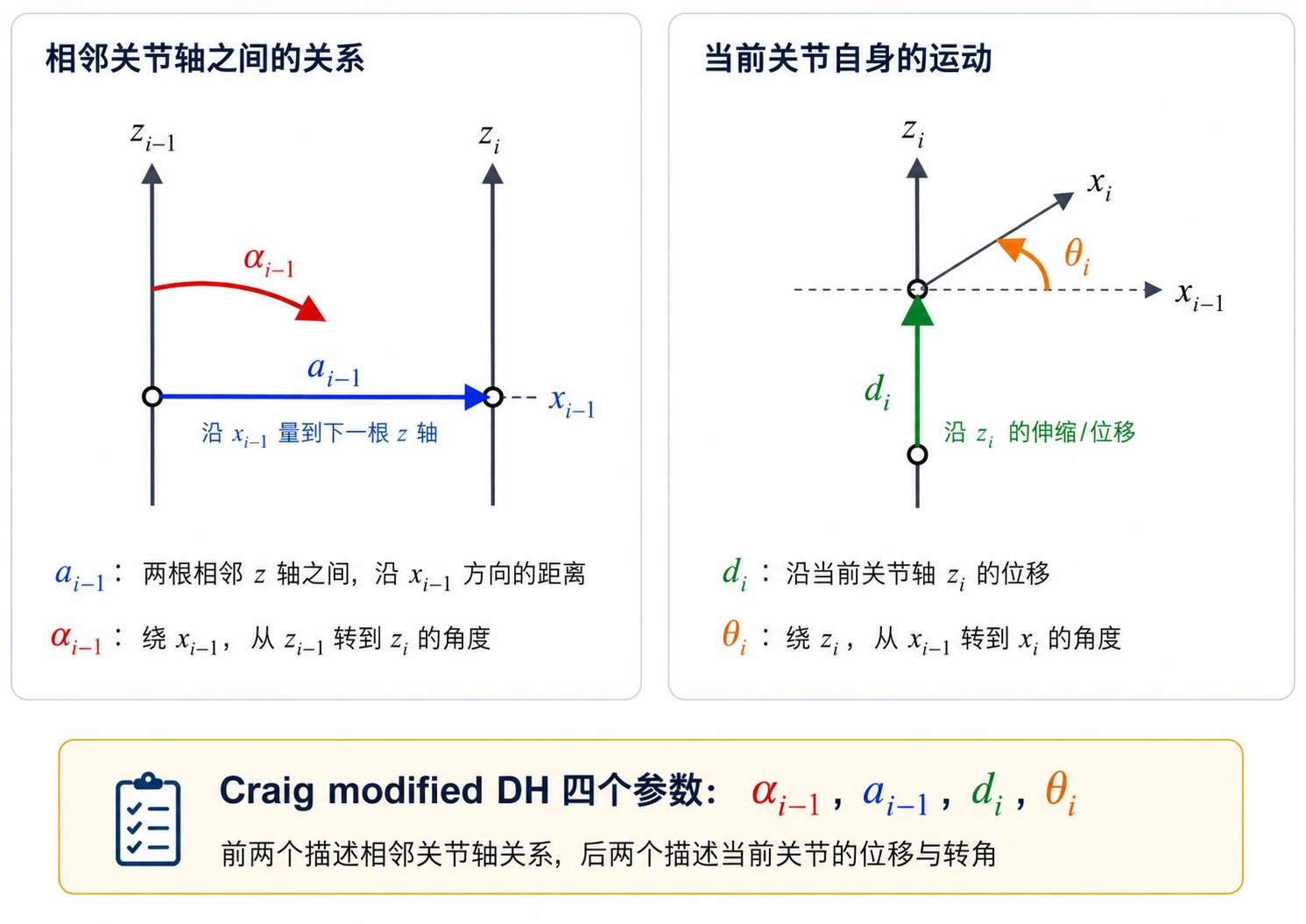
对应到参数表,可以写成:
| 参数 | 几何含义 | 旋转关节中的角色 |
|---|---|---|
| 沿 | 常与连杆长度相关,但不一定等于机械结构的外形长度 | |
| 绕 | 描述相邻关节轴之间的夹角 | |
| 沿 | 旋转关节中通常为常量;移动关节中通常是变量 | |
| 绕 | 旋转关节的关节变量 |
从计算角度看,DH 的价值在于:一行参数就能生成一个固定形式的 4×4 矩阵,整条机械臂仍然按
但 DH 不是机器人模型文件的通用格式。URDF / MJCF 中的关节坐标系通常已经由建模工具、CAD 导出流程或仿真器约定好;这些坐标系不一定满足 DH 选系规则。把一个真实模型改写成 DH 表,往往需要重新放置中间坐标系,并逐个关节核对轴向、偏置和正方向。因此,本章后面的实现采用 URDF / MJCF 更自然的父-子链式写法。
2.5.2 URDF / MJCF 链
URDF / MJCF 不要求我们重新按 DH 规则摆坐标系。它采用更直接的父-子链式约定:机器人是一棵树,link 是树上的节点,joint 是连接两个节点的边。沿着 parent → child 的方向把每条边的变换乘起来,就得到末端位姿。
world → base → link1 → link2 → link3 → ... → end_effector
joint1 joint2 joint3
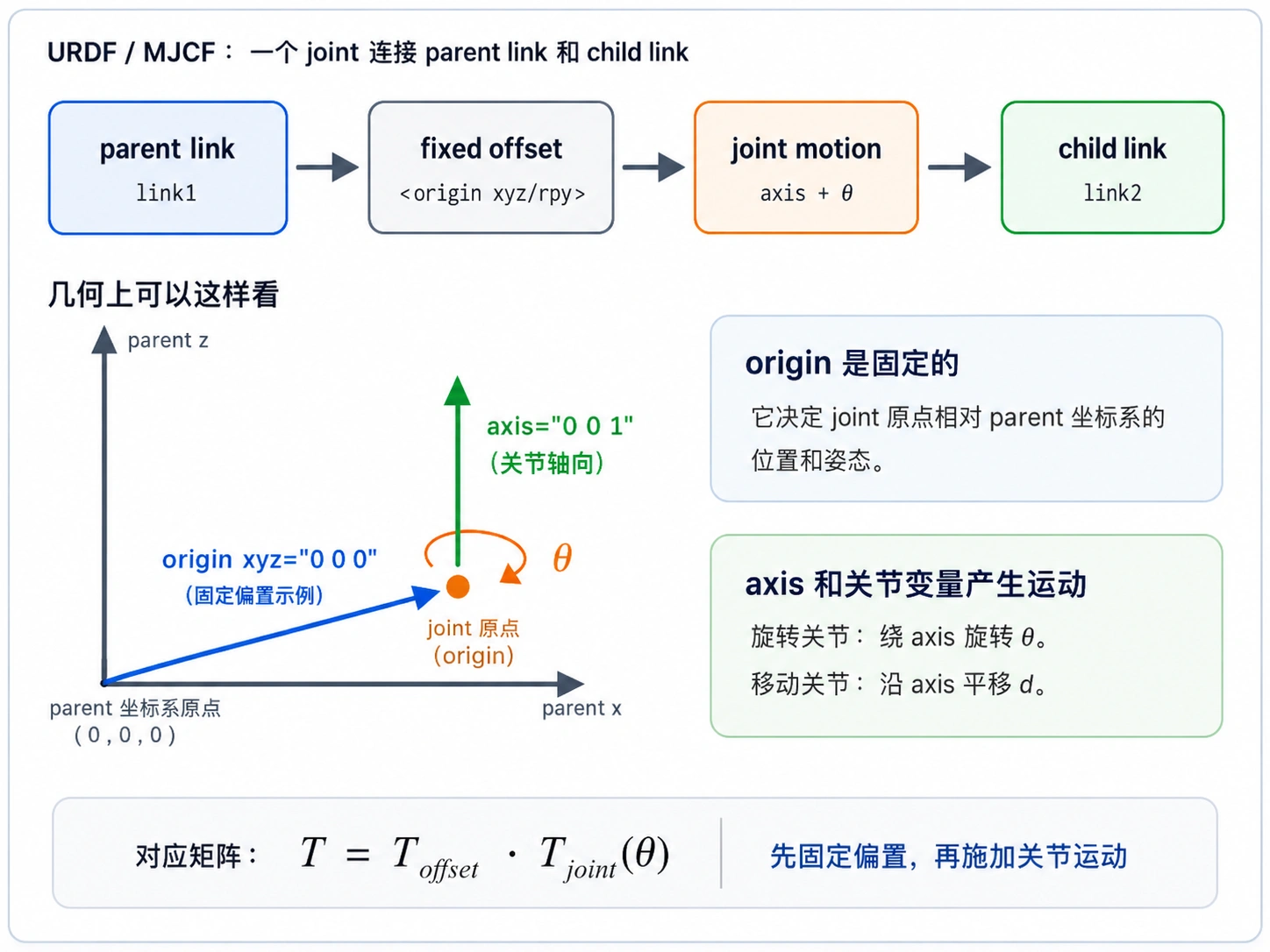
读一个 <joint> 时,可以先把它拆成四个问题:
parent:这条边从哪个连杆出发?child:这条边连到哪个连杆?origin:在父连杆坐标系里,关节原点放在哪里、朝向如何?axis:如果这是旋转关节或移动关节,它沿哪根轴运动?
URDF / MJCF 父-子链中这四个字段的关系如 图 6 所示。关键是:origin 是模型加载时就确定的固定偏置;axis 是运行时关节变量
仍然用 joint2 举例:
<!-- joint2 是 link1 -> link2 这条边;axis 表示运行时绕关节 z 轴旋转 -->
<joint name="joint2" type="revolute" axis="0 0 1">
<!-- 固定偏置:从 link1 原点沿 x 走 0.3 m,姿态不变,到达 joint2 原点 -->
<origin xyz="0.3 0 0" rpy="0 0 0"/>
<!-- 这条边从 link1 出发 -->
<parent link="link1"/>
<!-- 绕 axis 转过当前关节角后,进入 link2 坐标系 -->
<child link="link2"/>
</joint>
将上述 XML 转换为齐次矩阵时,可以将其分解为固定变换和关节变换两部分:
- 固定变换由
origin给出,描述关节坐标系相对于父连杆坐标系的静态位姿。这里xyz="0.3 0 0"且rpy="0 0 0",因此固定变换为。 - 关节变换由
type、axis和当前关节变量共同决定。这里type="revolute"且axis="0 0 1",因此关节角对应绕 轴的旋转 。
因此,对于该 joint2,从 link1 坐标系到 link2 坐标系的变换为:
对第
其中 origin 决定,在模型加载后保持不变;axis 的旋转;对于移动关节,它表示沿 axis 的平移。
本章后续实现采用这一表示方式。其优点是 FK 代码可以直接读取 URDF / MJCF 中的参数,无需先将模型手动转换为 DH 表。两种约定的对照见表 1。
| 维度 | DH 参数 | URDF / MJCF 父-子链 |
|---|---|---|
| 每个关节的描述 | 四个参数 | 一个 <origin> + 一个 axis + 一个 |
| 坐标系位置 | 由 DH 规则强制(常与机械结构错位) | 自由放置(一般贴在父关节) |
| 与仿真器衔接 | 需要手算转换 | 加载即用 |
| 适合场景 | 教材推导、解析式 IK | 仿真、真机、可视化 |
2.6 平面 3-DoF 手推
作为热身,先考虑最干净的平面 3-DoF 臂:三个连杆长度为
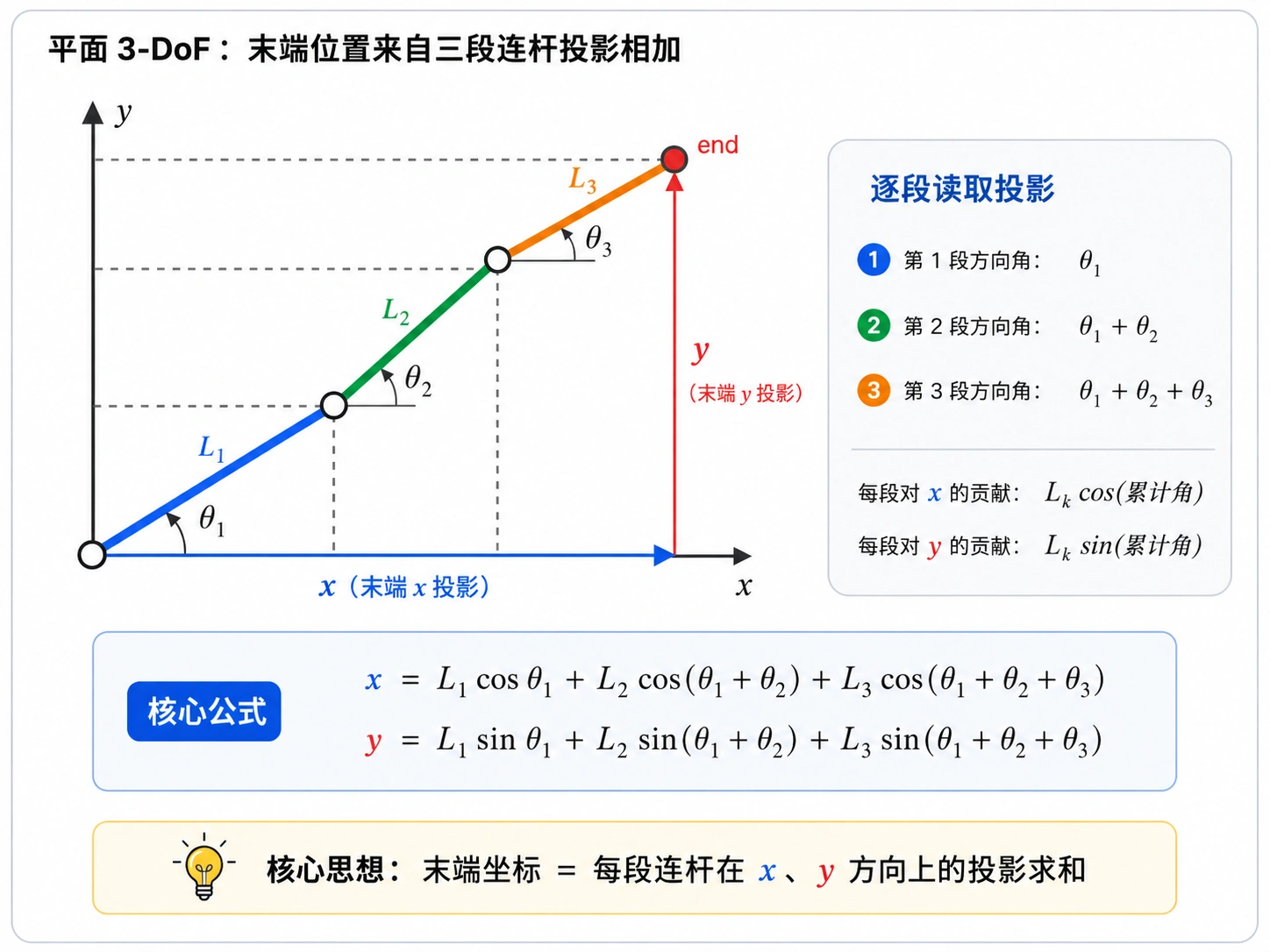
推导时先确定每段连杆相对世界坐标系的方向角:
- 第 1 段方向角是
。 - 第 2 段的方向由前两个关节共同决定,所以方向角是
。 - 第 3 段的方向由三个关节共同决定,所以方向角是
。
一段长度为
如果把末端姿态也一起写出来,这个平面例子其实还有一个很干净的结果:
也就是说,这个 3-DoF 平面臂的完整 FK 输出可以理解成
注意这里关节角是逐级累加的——这是下一章解析 IK 能那么干净收敛的关键。
把它写成齐次矩阵形式,方便后面推广到 3D:
接下来需要说明的是:为什么链式矩阵相乘后,末端位置可以直接从结果矩阵中读取。
原因在于齐次变换矩阵始终保持如下结构:
右上角的
所以末端位置不是额外算出来的,而是已经存放在 T[:3, 3],读的正是这一列的前三个分量;平面问题里
2.7 NumPy 与 MuJoCo
先定义两个最基础的齐次变换构造器,后面所有 FK 代码都靠它们拼积木:
import numpy as np
def rot_z(theta):
c, s = np.cos(theta), np.sin(theta)
T = np.eye(4)
# 齐次矩阵左上角 3x3 存旋转;这里是绕 z 轴的二维平面旋转。
T[:3, :3] = [[c, -s, 0],
[s, c, 0],
[0, 0, 1]]
return T
def trans(x, y, z):
T = np.eye(4)
# 齐次矩阵第 4 列前三项存平移向量,也就是子坐标系原点的位置。
T[:3, 3] = [x, y, z]
return T
把式
def fk_planar(thetas, L=(0.3, 0.25, 0.15)):
t1, t2, t3 = thetas
# 每一组 rot_z(theta_i) @ trans(L_i, 0, 0)
# 对应一节“先绕关节转,再沿当前连杆 x 方向走 L_i”。
T = rot_z(t1) @ trans(L[0], 0, 0) \
@ rot_z(t2) @ trans(L[1], 0, 0) \
@ rot_z(t3) @ trans(L[2], 0, 0)
return T # 末端位置直接读 T[:3, 3];末端姿态在 T[:3, :3] 里。
然后用 MuJoCo 的 mj_forward 作为"标准答案"交叉校验——给 100 组随机关节角,比较末端位置的最大误差。
先写一份与 fk_planar 默认参数对齐的最小 MJCF,存成 planar_3dof.xml:
<mujoco model="planar_3dof">
<!-- 本例只校验几何位姿;设为零重力,让模型文件保持最小配置 -->
<option gravity="0 0 0"/>
<worldbody>
<body name="link1" pos="0 0 0">
<!-- 三个关节都绕 z 轴旋转,对齐 fk_planar 里的 rot_z(theta_i) -->
<joint name="j1" type="hinge" axis="0 0 1"/>
<geom type="capsule" fromto="0 0 0 0.3 0 0" size="0.02"/>
<!-- pos 是 link2 相对 link1 的固定偏置,对应 trans(L1, 0, 0) -->
<body name="link2" pos="0.3 0 0">
<joint name="j2" type="hinge" axis="0 0 1"/>
<geom type="capsule" fromto="0 0 0 0.25 0 0" size="0.018"/>
<!-- pos 是 link3 相对 link2 的固定偏置,对应 trans(L2, 0, 0) -->
<body name="link3" pos="0.25 0 0">
<joint name="j3" type="hinge" axis="0 0 1"/>
<geom type="capsule" fromto="0 0 0 0.15 0 0" size="0.015"/>
<!-- site 放在第三节末端,对应 trans(L3, 0, 0) 后的末端点 -->
<site name="end_site" pos="0.15 0 0" size="0.01"/>
</body>
</body>
</body>
</worldbody>
</mujoco>
三个 hinge 关节都绕 pos 就是父关节到子关节的固定偏置 end_site 标在第三节末端,正是 Python 代码里 mj_name2id(..., 'end_site') 要查询的 site。
import mujoco
model = mujoco.MjModel.from_xml_path('planar_3dof.xml')
data = mujoco.MjData(model)
# 后面比较的是 end_site 的世界坐标,所以先拿到它在 MuJoCo 模型里的 id。
end_id = mujoco.mj_name2id(model, mujoco.mjtObj.mjOBJ_SITE, 'end_site')
max_err = 0.0
for _ in range(100):
# 随机采样一组关节角,覆盖不同姿态,而不是只测零位。
q = np.random.uniform(-np.pi, np.pi, size=3)
data.qpos[:3] = q
mujoco.mj_forward(model, data) # 让 MuJoCo 按 kinematic tree 更新所有位姿
p_mj = data.site_xpos[end_id] # MuJoCo 算出的 end_site 世界坐标
p_ours = fk_planar(q)[:3, 3] # 自己的 FK 矩阵第 4 列前三项
max_err = max(max_err, np.linalg.norm(p_mj - p_ours))
print(f'max |p_ours - p_mj| = {max_err:.2e}')
# 期望量级在 1e-14 ~ 1e-12;超过 1e-6 基本是参数/轴向写错了
FK 是后面 IK、雅可比、控制器的共同基石——差 0.5 mm,在 §3 末端画圆时就是一圈肉眼可见的毛刺,所以这一步要对齐到 1e-12 量级再往下走。
2.8 雅可比矩阵
FK 给出的是"给定关节角,末端在哪里"。在控制和 IK 中,还需要回答另一个问题:关节角发生一个很小的变化时,末端位置会如何变化。若只考虑位置部分,可以把 FK 写成:
对
其中
对平面 3-DoF 臂,末端位置是二维量
令
这个矩阵的结构也反映了运动链的因果关系:
在 3D 机械臂中,如果同时描述末端线速度和角速度,常用的空间雅可比为
有两种常用算法:
- 解析求导:先写出 FK 的显式表达式,再对每个
求偏导。它适合结构简单、公式可以手动推导的机械臂;优点是运行时计算直接,缺点是公式与具体机构强绑定。 - 几何雅可比:不展开完整 FK 公式,而是直接利用每个关节轴在世界坐标系下的位置和方向。对旋转关节,第
列通常写成
其中
雅可比在后续章节会反复出现:§3 数值 IK 用它把末端位置误差转成关节角修正量;§5 接触力分析会用到雅可比转置;§6 奖励设计中也会用它描述末端速度。因此,本节只需要先建立两个结论:雅可比是 FK 对关节变量的局部线性化;它的每一列描述一个关节对末端瞬时运动的贡献。
2.9 工作空间散点
工作空间(reachable workspace) 是末端能到达的所有点的集合。用 FK 做一次 Monte Carlo 就能把它画出来:
import matplotlib.pyplot as plt
pts = []
for _ in range(20000):
q = np.random.uniform(-np.pi, np.pi, size=3)
pts.append(fk_planar(q)[:2, 3])
pts = np.array(pts)
plt.figure(figsize=(5, 5))
plt.scatter(pts[:, 0], pts[:, 1], s=1, alpha=0.3)
plt.axis('equal'); plt.title('3-DoF planar arm workspace')
plt.show()
运行结果应接近 图 8 所示的点云。由于本例的三段长度满足
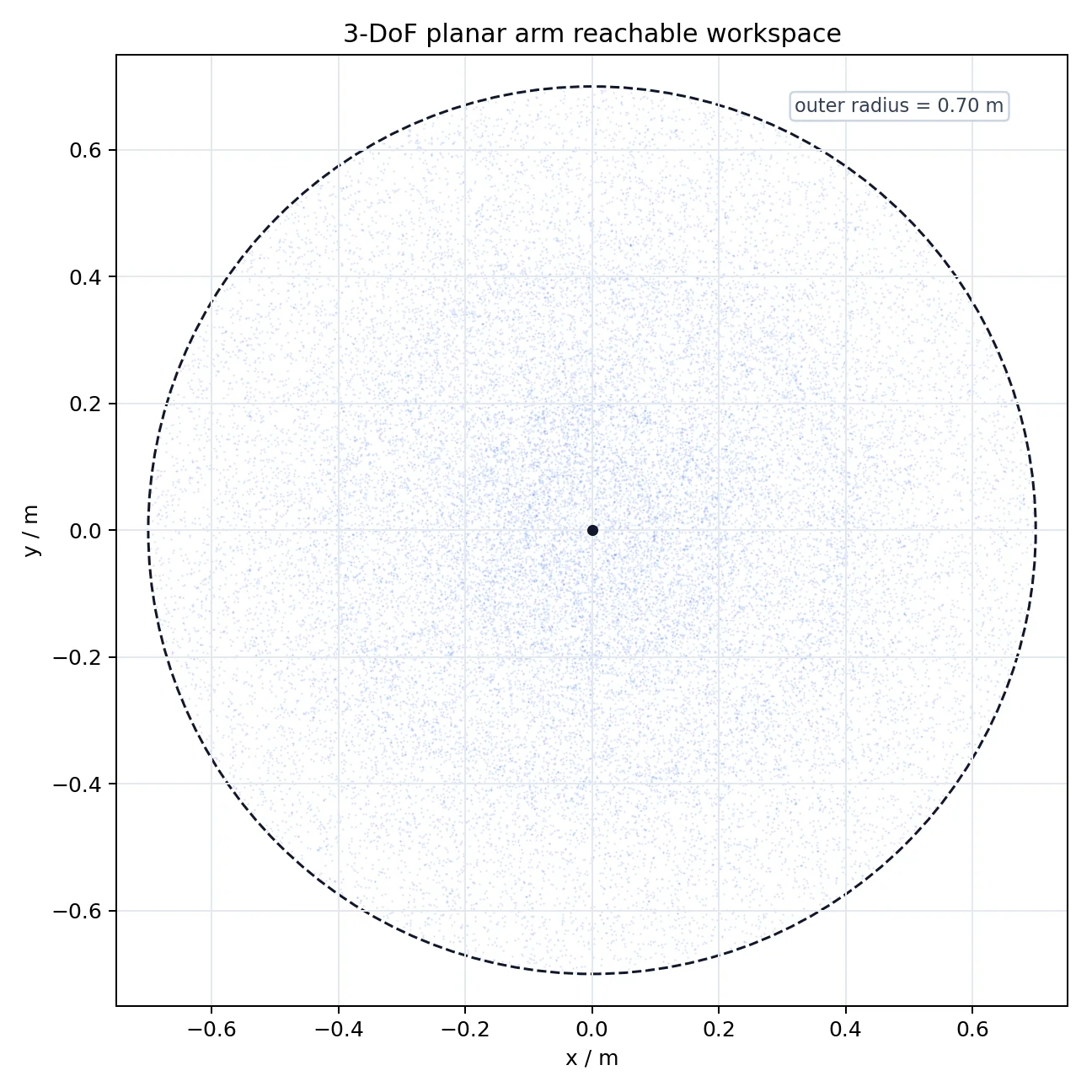
这张图在 §3 选 IK 目标时会派上用场:目标点落在工作空间外就是典型的"无解",这时再好的 IK 算法也无法得到满足约束的关节角。
2.10 末端叠加可视化
MuJoCo 支持在 viewer 里叠加"调试几何",非常适合把 FK 的中间结果可视化出来——比如末端位置、每一节连杆坐标轴、目标点。
import mujoco.viewer
with mujoco.viewer.launch_passive(model, data) as v:
while v.is_running():
# 假设我们在 Python 里用自己的 FK 算末端位置
p = fk_planar(data.qpos[:3])[:3, 3]
# 清空旧的调试几何再画
v.user_scn.ngeom = 0
mujoco.mjv_initGeom(
v.user_scn.geoms[0],
type=mujoco.mjtGeom.mjGEOM_SPHERE,
size=[0.02, 0, 0], pos=p, mat=np.eye(3).flatten(),
rgba=[1, 0.3, 0.3, 1],
)
v.user_scn.ngeom = 1
mujoco.mj_step(model, data)
v.sync()
预期效果如 图 9 所示。若 FK 链式乘法、body pos 和 joint axis 均一致,两者应重合在第三节连杆末端。
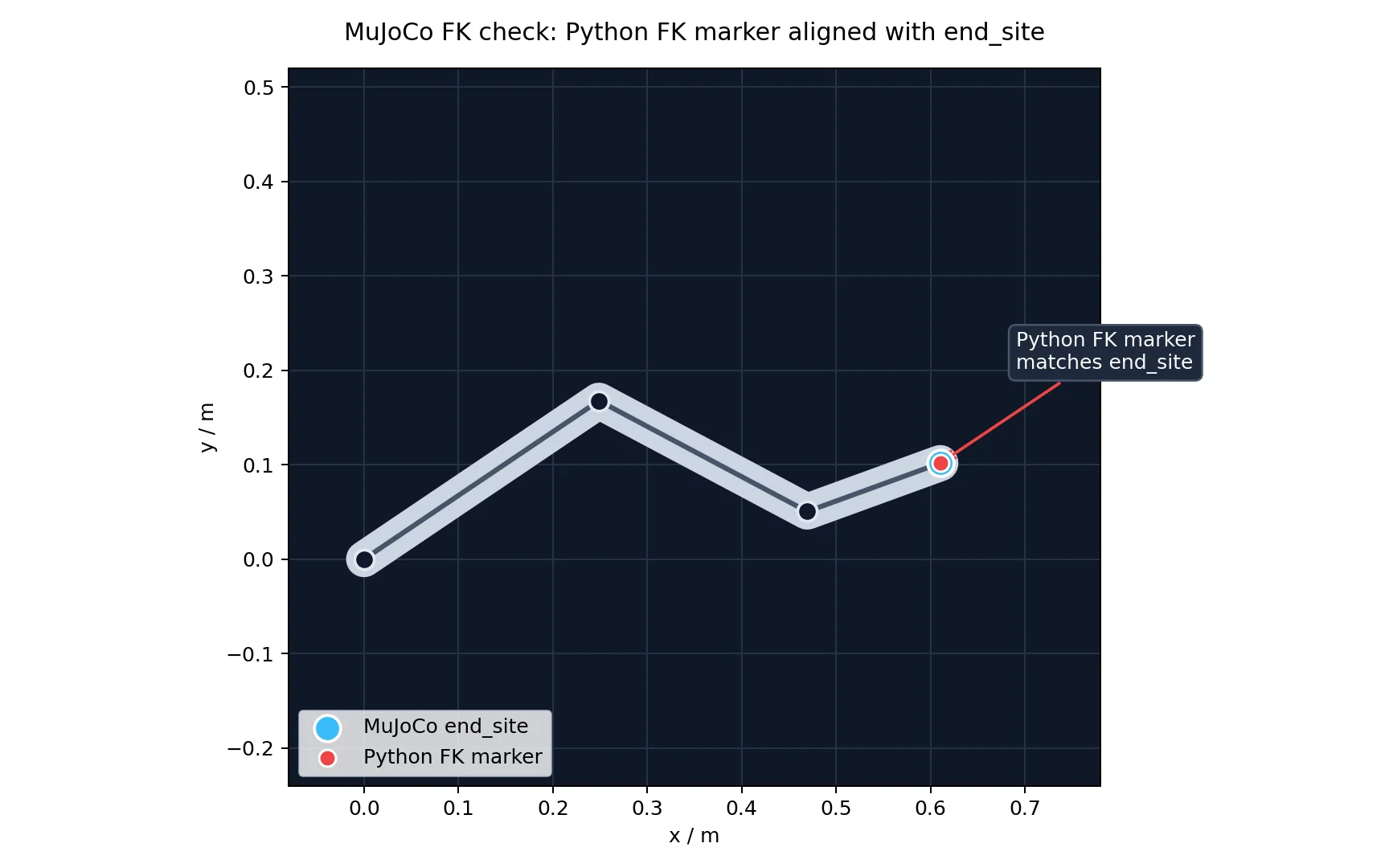
这一步的目的,是把 Python 代码中的数学模型和 MuJoCo 模型中的运动链对齐。如果红色点偏离蓝色点,优先检查坐标系定义、body pos 参数、joint axis 方向以及矩阵乘法顺序。到 §3 做 IK 时,目标点和当前末端都会用这种方式实时叠加到场景中。
小结
- 机械臂的组成:关节(Joint) 定义自由度,连杆(Link) 是关节之间的刚体;末端执行器是最后一个连杆,它的状态由位置 + 姿态合成的位姿(pose) 描述。
- FK 是什么:FK 把关节角映射到末端位姿
,位姿用坐标系来描述——常见的有世界、基座、连杆、末端四种,FK 的链式乘法本质就是在它们之间逐级变换。 - 运动链与齐次变换:把基座、各连杆、末端按"父→子"串起来就得到运动链;每个关节对应一个"固定偏置 + 轴向旋转"的变换,齐次变换矩阵
把位置和姿态合在一起,可以一路乘下去得到末端位姿。 - 两种描述约定:DH 参数(教材推导)和 URDF / MJCF 父-子链式约定(仿真 / 真机)是描述运动链的两条路;后者更贴近实际机器人描述,本章代码全部按这一约定写。
- 从 FK 到雅可比:齐次矩阵描述末端"在哪、朝哪",雅可比
描述"关节角怎么动,末端怎么动"——它是运动学和动力学之间的桥梁,也是下一章数值 IK 的核心工具。
思考
-
§2.5.2 提到 URDF 的
<origin>是常量、 axis+是变量 。如果某个关节的 <origin rpy="0.5 0 0">(父连杆预先绕 x 轴转了 0.5 rad),这 0.5 rad 应该出现在 FK 链式乘法的哪一项?关节角取时末端位置会和 rpy="0 0 0"时不同吗? -
把 §2.6 平面 3-DoF 的第三个关节换成移动关节(沿 link2 末端
轴平移 ),末端位置 与朝向 该怎么写?为什么这种情况下 仍然只取决于前两个旋转关节? -
§2.7 自写 FK 与
mj_forward的误差通常在1e-12 ~ 1e-14量级。如果把 MJCF 里某个<body pos>写成0.299 0 0(少 1 mm),误差会跳到什么量级?三个关节里这种"参数对不齐"出在哪一节最严重? -
§2.9 用 Monte Carlo 采样画出工作空间。给定
,能不能解析写出工作空间外边界和内边界的半径?什么条件下三连杆可以折叠到原点(内边界半径为 0)? -
§2.8 几何雅可比第
列依赖 。如果机械臂处于"完全伸直"姿态(所有 ),这个雅可比的行列式会接近零——这个现象叫什么名字、几何意义是什么、对下一章的数值 IK 会带来什么麻烦?
动手任务
§2.10 那个红球只是把"Python FK"和"MuJoCo FK"在一条平面 3-DoF 臂上对齐了一次。本章动手任务把同一招升级到 Pupper 真腿——三个关节不再都是
脚本扫频版:HAA / HFE / KFE 依次在各自限位区间里单独扫一遍,红球按你写的 fk_leg(θ) 实时叠在 foot site 上。这是作品集 GIF;Lab 还自带一组 tkinter 滑杆 teleop 模式(uv run python lab_2_fk_teleop/starter.py --viewer),可以手动拖三个关节实时验证 FK——这才是 §2.10 那个红球的真腿版。
要做的四件事:
- 在 §1 的
scene.xml上删掉<equality>整块,让 HAA / HFE / KFE 都能动 - 写
fk_leg(θ)的四段齐次变换链;100 组随机关节角对mj_forward误差m - tkinter 三滑杆 +
mujoco.viewer.launch_passive,红球实时叠在 foot 上 - Monte Carlo 采 2 万点,画 Pupper 工作空间"葫芦"散点(§2.9 平面甜甜圈的 3D 版)
完整 starter / 测试 / 交付清单见 exercises/lab_2_fk_teleop/。
参考资料
- CS123 Lecture 3: Forward Kinematics
- 《机器人学导论》(Craig)第 3 章