3. 逆运动学
正运动学描述的是从关节角到末端位姿的映射:关节角 → 末端。逆运动学解决相反的问题:给定一个末端目标,求出对应的关节角。这一章我们用两种方式实现 IK,并把它接到 §1 的 PD 控制器上,做出第一个"点到点控制" demo。
本章目标
- 理解 IK 的多解性、奇异性、可达性
- 能对 3-DoF 平面臂手推解析解
- 能用雅可比伪逆法 / damped least squares 写数值 IK
- 在 MuJoCo 里让机械臂末端追踪一个移动目标
前置阅读
- 第 2 章 正运动学
- ROS · 正逆运动学实现
- 交互页:IK Playground,鼠标拖目标就能看 DLS 的收敛
3.1 什么是逆运动学
正运动学(Forward Kinematics, FK) 的目标是:给定一组关节角
FK 是一个干净的前向函数,IK 则是"解一个非线性方程组",通常欠定或过定——这正是它比 FK 麻烦的根源。
3.2 解析解 vs 数值解
求 IK 的方法可以分两大类:
- 解析解(Analytical / Closed-form):把方程组手推到底,直接给出
的显式表达。一次到位、不迭代、无误差,但只对特定结构(平面臂、球腕 6-DoF 机械臂等)写得出来。 - 数值解(Numerical / Iterative):从一个起始
出发,用雅可比把方程线性化,迭代逼近目标。阻尼最小二乘(Damped Least Squares, DLS) 是工业界主力。通用——任意结构、任意自由度都能跑,代价是依赖初值、容易卡在局部最优。
经验法则:有特解就用解析,一般机械臂 / 人形 / 四足都用数值。下面两节分别展开,§3.5 再回来谈三类绕不开的工程难题。
3.3 3-DoF 解析法
先退到最干净的情形——3-DoF 平面臂,三节长度
常见的简化做法是把"末端朝向"也作为输入(
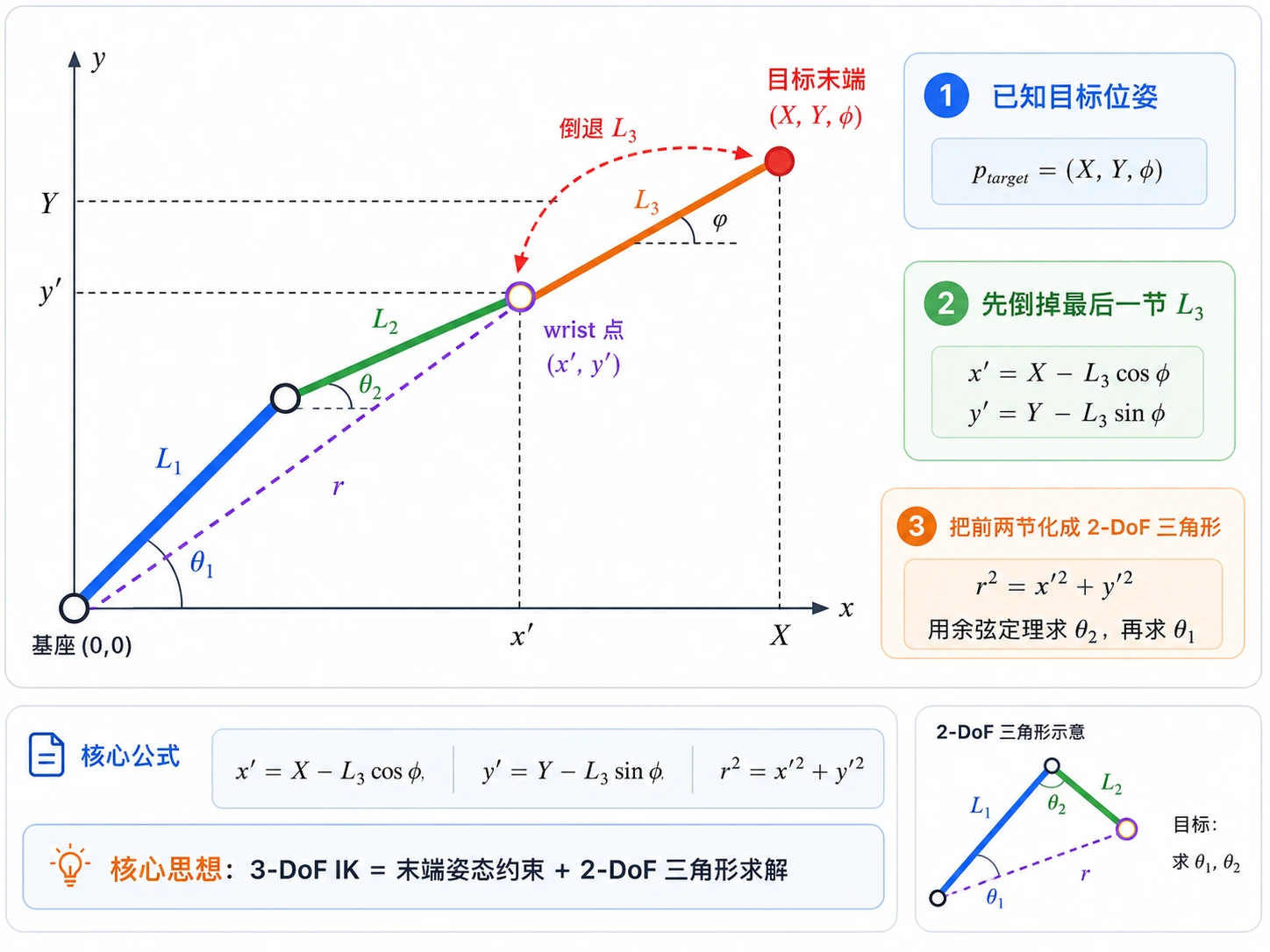
令:
由余弦定理:
- 若
:目标不可达,直接返回"不行"。 - 否则
——正负号就是"肘上/肘下",一般按期望构型固定选一个。
演示代码如下:
import numpy as np
def ik_analytic_planar(xy, phi, L=(0.3, 0.25, 0.15), elbow_up=True):
X, Y = xy
L1, L2, L3 = L
xp = X - L3 * np.cos(phi)
yp = Y - L3 * np.sin(phi)
r2 = xp * xp + yp * yp
cos_t2 = (r2 - L1**2 - L2**2) / (2 * L1 * L2)
if abs(cos_t2) > 1.0:
return None # 不可达,调用方要能处理 None
t2 = np.arccos(cos_t2) * (1.0 if elbow_up else -1.0)
t1 = np.arctan2(yp, xp) - np.arctan2(L2 * np.sin(t2), L1 + L2 * np.cos(t2))
t3 = phi - t1 - t2
return np.array([t1, t2, t3])
解析解的价值不是"省 CPU",而是做数值解的参考答案:下一节的数值 IK 跑完后,在平面工况下和解析解比一下,能第一时间抓到"我的雅可比写错了"这类 bug。
3.4 DLS 数值法
一旦到 6-DoF 一般机械臂、人形机器人,解析解要么不存在、要么写出来比数值法还长。业内的通用解法是迭代线性化 + 最小二乘。
从当前构型
最朴素的"雅可比伪逆法"是直接
阻尼最小二乘(DLS) 把它改造成一个带正则的最小二乘:
闭式解:
演示代码如下:
def ik_dls(fk_fn, jac_fn, theta0, p_target,
lam=0.05, step=0.3, tol=1e-4, max_iter=200):
# 从初始关节角开始迭代;copy 避免改动调用方传进来的 theta0。
theta = theta0.copy()
for k in range(max_iter):
# 用当前关节角做一次 FK,得到当前末端位置。
p = fk_fn(theta)
# 末端误差:希望末端从当前位置 p 走到目标 p_target。
e = p_target - p
if np.linalg.norm(e) < tol:
return theta, k
# 雅可比把“小的关节角变化 dtheta”线性映射成“小的末端位移 dp”。
J = jac_fn(theta) # (3, n) 或 (6, n)
# DLS 使用 J^T (J J^T + lambda^2 I)^(-1) e。
# lambda^2 I 是阻尼项,用来避免奇异附近矩阵病态。
JJt = J @ J.T
dtheta = J.T @ np.linalg.solve(
JJt + (lam ** 2) * np.eye(JJt.shape[0]), e)
# step 是外层步长,防止一次更新太猛导致震荡或越走越远。
theta = theta + step * dtheta
return theta, max_iter # 没收敛也要返回,调用方决定怎么办
几个调试时会反复遇到的现象:
step取 1.0 很容易震荡、越走越远:减到 0.2~0.3 往往就稳了。lam = 0效果最"贪心",但一进奇异就蹦;lam太大则慢到收敛不动——经验值 0.01~0.1。- 迭代 500 次还没收敛,往往不是数值问题,而是目标本来就不可达。
3.5 三个难题
不论用解析还是数值,在 MuJoCo / Isaac Sim 这类仿真器或真机上写 IK,总会反复撞上同样的三类问题。这三件事就是 §3 真正的难点——算法本身只是骨架,工程上能不能用,看的是这三个坑怎么填。
3.5.1 多解性
多解性(Multiple Solutions) 指的是:到达同一个目标点,机械臂常常有不止一组关节角——平面 2-DoF 臂对应"肘朝上 / 肘朝下"两组,一般 6-DoF 机械臂经常有 8 组甚至 16 组。选哪组不是数学问题,而是工程约束——自碰撞、关节限位、能量最小、上一步最近。
最常见的工程做法:
- 热启动:把上一步的
作为下一步 IK 的初值,数值法会自然收敛到"离当前最近"那一支,避免肘上 / 肘下来回跳。 - 多 seed 并行:MoveIt2、TRAC-IK 等框架会同时从若干随机初值跑,再按代价(避碰、能量)挑一个最优。
- 解析法显式选支:像 §3.3 那样,直接用一个
elbow_up布尔位钉死构型。
3.5.2 奇异状态
奇异状态(Singularity) 指的是:当机械臂完全伸直、或几个关节轴线重合时,雅可比矩阵退化——
几何上,这对应"机械臂瞬间少了一个自由度":6-DoF 机械臂第 2、3 关节共线时,腕关节的某些方向再怎么转,末端也出不去。
三种处理思路,从软到硬:
- DLS 阻尼(§3.4 的默认做法):用
把奇异值"垫起来",最常用、性价比最高。 - 奇异值截断 (Truncated SVD):把小于阈值的奇异值强行置 0,等价于放弃那个方向的修正。
- 路径规划层面绕开:把奇异区在工作空间里框出来,IK 之前就不让目标落进去。
实战上,DLS + 关节限位 + 起步 seed 多样化是性价比最高的组合。
3.5.3 不可达性
不可达性(Reachability) 指的是:目标点超出机械臂物理长度范围,数学上方程组无解——这正是 §2 那张"甜甜圈"图之所以重要的原因。严肃的 IK 实现会先做一次"目标是否可达"的保护,再进迭代。
还有一种更隐蔽的"可达但到不了":目标在工作空间里,但当前构型被关节限位、自碰撞或环境障碍物挡住,数值法只能收敛到一个局部最优。这时单跑一次 IK 注定失败,需要靠 §3.5.1 提到的多 seed 或显式路径规划绕过去。
DLS 在这两类情形下都不会崩——它会"贴着边缘最近点"跟着目标走(§3.9 会直观看到这一点),这是它相对纯伪逆最大的工程优势。
3.6 IK + PD 控制
IK 给出的是关节目标角,不是力矩。把它喂进 §1 那条 PD 回路,就构成了机器人学里最基础的 Task-space → Joint-space → Torque 三层串联:
上面这条实线是命令链路:末端目标先被 IK 换成关节目标角,再由 PD 换成力矩。下面这条虚线是反馈链路:MuJoCo 每一步都会给出当前关节角和关节速度,PD 用它们计算误差并修正下一次力矩。
3.6.1 MuJoCo FK / 雅可比
§3.4 的 ik_dls 留了两个口子——fk_fn 和 jac_fn,这一节先把它们落地。手算雅可比对 3-DoF 平面臂还行,到 6-DoF 真机就非常容易写错;更靠谱的工程做法是直接让 MuJoCo 替你算:
import mujoco
import numpy as np
model = mujoco.MjModel.from_xml_path('planar_3dof.xml')
data = mujoco.MjData(model)
end_id = mujoco.mj_name2id(model, mujoco.mjtObj.mjOBJ_SITE, 'end_site')
def fk_mj(theta):
data.qpos[:3] = theta
mujoco.mj_forward(model, data) # 跑一次正运动学
return data.site_xpos[end_id, :2].copy() # 平面臂只取 (x, y)
def jac_mj(theta):
data.qpos[:3] = theta
mujoco.mj_forward(model, data)
jacp = np.zeros((3, model.nv))
mujoco.mj_jacSite(model, data, jacp, None, end_id)
return jacp[:2, :3] # 平面臂取前 2 行、前 3 列
mj_jacSite 会按当前 qpos 直接把 site 的几何雅可比算出来,省掉所有手推工作;要切换到不同机器人,只要换 XML 和 site 名字。§2 那条"自写 FK vs mj_forward 误差 < 1e-12"的校验思路在这里同样适用:写完手算的 jac_fn 后,跟 jac_mj 在同一组
3.6.2 最小控制循环
把上面的 fk_mj / jac_mj 接进 PD:
# 这里的机械臂有 3 个旋转关节,所以 Kp/Kd 都写成长度为 3 的数组。
# 第 i 个元素就是第 i 个关节自己的 PD 增益,而不是末端 x/y/z 三个方向的增益。
# 第 3 个关节通常更轻、更短,所以这里给它更小的增益,避免力矩过硬导致抖动。
Kp = np.array([40.0, 40.0, 20.0])
Kd = np.array([ 4.0, 4.0, 2.0])
# theta 保存 IK 求出来的“目标关节角”。
# 初始值用零位;后面每一轮都会把上一轮结果继续传给 ik_dls,作为热启动。
theta = np.zeros(3) # IK 的热启动值
for _ in range(5000):
# 任务空间目标:希望末端到达平面坐标 (0.4, 0.1)。
# 注意这里是末端位置目标,不是关节角目标。
p_target = np.array([0.4, 0.1]) # 或者第 3.7 节里让它画圆
# IK 层:把末端目标 p_target 转成 3 个目标关节角 theta。
# fk_mj/jac_mj 分别由 MuJoCo 提供当前模型的 FK 和雅可比。
# 返回的 theta 只是“应该去哪里”,还不是直接施加到电机上的力矩。
theta, _ = ik_dls(fk_mj, jac_mj, theta, p_target) # 直接传 MuJoCo 版本
# 读取仿真器里的当前关节状态。
# q 是当前 3 个关节角,dq 是当前 3 个关节速度。
q, dq = data.qpos[:3], data.qvel[:3]
# PD 层:把“目标关节角 theta”和“当前关节角 q”的误差变成关节力矩。
# Kp * (theta - q) 是位置误差项,让关节往目标角度靠近。
# Kd * (-dq) 是阻尼项;目标速度默认为 0,所以速度误差是 0 - dq。
# NumPy 会逐关节相乘,最后得到 3 个力矩,分别写入 3 个 actuator。
data.ctrl[:3] = Kp * (theta - q) + Kd * (-dq)
# MuJoCo 用这 3 个力矩推进一步物理仿真,更新下一轮会读到的 q/dq。
mujoco.mj_step(model, data)
两条别忽略的工程点:
- 把上一步的
theta作为下一步 IK 的热启动——DLS 是局部方法,起点离得越近迭代越少、越不容易跳到"肘上/肘下"的另一解。 - IK 的频率可以低于 PD。典型值 IK 200 Hz、PD 1 kHz,这也是真机上大多数控制栈的默认配置。
不想装 MuJoCo 可以打开 IK Playground,鼠标拖目标就能看 DLS 的收敛过程——尤其是拖到机械臂"伸直"那条奇异线附近,能直观感受 ik_dls,只是搬到浏览器里、不挂物理引擎。
3.7 实验:末端画圆
用一个参数化目标轨迹,就能看到 IK + PD 是不是真的"连成一条线":
import numpy as np
center = np.array([0.45, 0.0])
R, T = 0.08, 4.0 # 半径 8 cm,周期 4 s
traj_log = []
while data.time < 20.0:
t = data.time
p_target = center + R * np.array([np.cos(2*np.pi*t/T),
np.sin(2*np.pi*t/T)])
theta, _ = ik_dls(fk_mj, jac_mj, theta, p_target)
q, dq = data.qpos[:3], data.qvel[:3]
data.ctrl[:3] = Kp * (theta - q) + Kd * (-dq)
mujoco.mj_step(model, data)
traj_log.append((t, p_target.copy(), data.site_xpos[end_id, :2].copy()))
观察重点:
- 圆画得圆不圆:不圆往往是 PD 跟不上,加大
或降低圆速度。 - 半径
加大到工作空间边缘时,圆会突然变成一段弧——那是 IK 开始返回 None,末端走不出去。 - 圆心
center设到这种绝对不可达的位置,可以看到 IK 直接退化成"朝目标方向伸直"。DLS 在这里是优雅失败,不崩不炸,而是尽力靠近。
把 traj_log 里的目标轨迹和实际轨迹画到同一张 matplotlib 图上,肉眼差距就是控制带宽 + IK 残差的总和;示例结果如 图 2 所示。
3.8 实验:末端走三角形
圆是连续可微的轨迹,IK 求解器没什么压力。换成三角形——三个角点处目标速度突变——就能把"IK + PD"这一串里每一环的极限暴露出来。
先写一个最小的轨迹生成器,整个三角形周期
def interpolate_triangle(t, vertices, period=3.0):
"""3 个顶点循环,每条边走 period/3 秒。返回当前目标点。"""
seg = (t % period) / (period / 3) # 0..3,落在哪条边上
i = int(seg) % 3 # 当前边的起点编号
s = seg - int(seg) # 这条边走了多少 (0..1)
p0, p1 = vertices[i], vertices[(i + 1) % 3]
return (1 - s) * p0 + s * p1
把它接到 §3.6 的控制循环里:
vertices = np.array([
[0.45, 0.10],
[0.30, -0.10],
[0.55, -0.05],
])
while data.time < 15.0:
p_target = interpolate_triangle(data.time, vertices, period=3.0)
theta, _ = ik_dls(fk_mj, jac_mj, theta, p_target)
q, dq = data.qpos[:3], data.qvel[:3]
data.ctrl[:3] = Kp * (theta - q) + Kd * (-dq)
mujoco.mj_step(model, data)
观察重点:
- 角点会被"圆"掉:目标速度在角点突变,但关节加速度受
限制——三角形的尖角会被磨成弧。这是控制带宽的直接体现,不是 bug。 - 拐角越急、
越大跟得越紧,但太大会震荡(§1 那个老问题)。把 从 40 调到 80,再调到 200,三种现象会很明显。 - 把三角形某个顶点放到工作空间边缘外,可以看到那一段被"裁短"成一条直冲向最远点的射线——这是 DLS 的饱和行为。
三角形轨迹的目标路径与实际末端路径对比如 图 3 所示,重点看角点处的圆滑化现象。
这一个实验和 §3.7 的圆放一起,刚好覆盖了"光滑轨迹 + 不光滑轨迹"两类典型任务,已经足够 §4 四足步态或 §5 末端抓取直接复用。
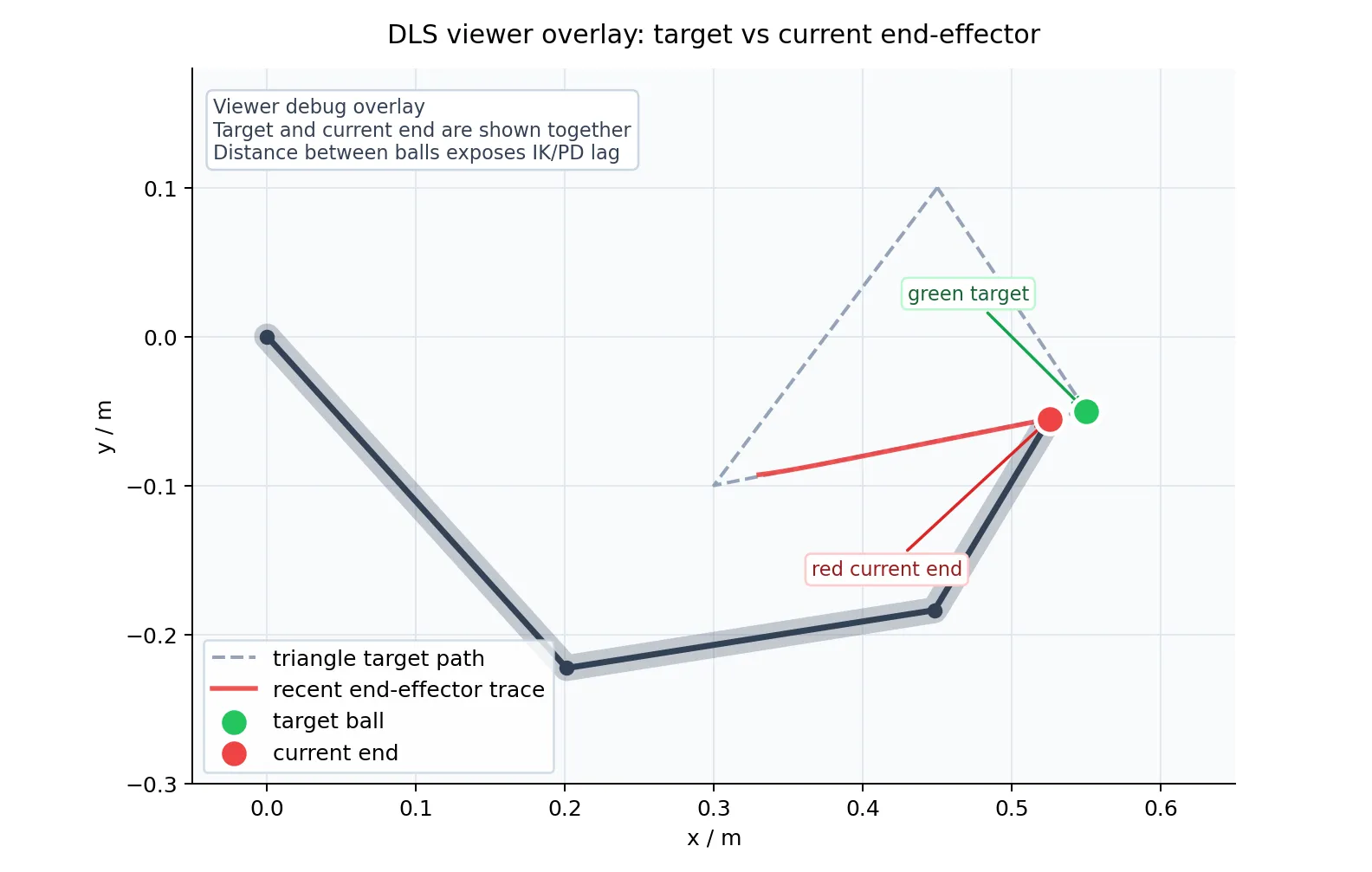
3.9 viewer 看 DLS 收敛
光看末端轨迹不够直观——把 目标点(绿球) 和 当前末端(红球) 都叠到 MuJoCo viewer 里,DLS 的"追"才能一眼看出来。这一段是 §2 viewer 实验的直接延伸,最终叠加效果见 图 4。
import mujoco.viewer
with mujoco.viewer.launch_passive(model, data) as v:
while v.is_running():
p_target = interpolate_triangle(data.time,
vertices, period=3.0)
theta, _ = ik_dls(fk_mj, jac_mj, theta, p_target,
lam=0.05)
q, dq = data.qpos[:3], data.qvel[:3]
data.ctrl[:3] = Kp * (theta - q) + Kd * (-dq)
mujoco.mj_step(model, data)
# 叠两个调试小球:绿色目标、红色当前末端
p_now = data.site_xpos[end_id]
v.user_scn.ngeom = 0
for k, (pos, rgba) in enumerate([
(np.r_[p_target, 0.0], [0.2, 0.9, 0.2, 1]),
(p_now, [0.9, 0.2, 0.2, 1]),
]):
mujoco.mjv_initGeom(
v.user_scn.geoms[k],
type=mujoco.mjtGeom.mjGEOM_SPHERE,
size=[0.015, 0, 0], pos=pos,
mat=np.eye(3).flatten(), rgba=rgba,
)
v.user_scn.ngeom = 2
v.sync()
最适合做这个实验的几组对照:
- 改
lam:从0.001→0.05→0.5,重点看奇异附近(机械臂接近完全伸直时)。lam=0.001会看到红球瞬间"飞出去"再被拉回;lam=0.5红球追得稳但永远滞后一截;lam=0.05是大多数情况下的甜点。 - 改
step:从 0.1 → 0.3 → 1.0,能直观看到迭代步长怎么换收敛速度和稳定性。 - 拖动目标到工作空间外面:把
vertices改大或写个鼠标交互,DLS 不会崩,红球会"贴着边缘最近点"跟着走——这就是 DLS 相对纯伪逆最大的工程优势。
这种"绿球 + 红球"叠加调试是真机上排障的标准动作:末端追不上目标到底是 IK 没收敛,还是 PD 跟不上,看一眼颜色就分得清。
小结
- IK 是反向问题:FK 是"关节角 → 末端位姿"的单向函数,IK 是反过来求"末端位姿 → 关节角"。它比 FK 麻烦得多——多解性(肘上/肘下)、奇异状态(雅可比退化)、不可达性(目标在工作空间外或被障碍物挡)三类工程难题都是常态。
- 解析解 vs 数值解:解析解只能在特例(平面 3-DoF、球腕 6-DoF 等)里写得出来,但价值很高,可以给数值解当参考答案抓 bug;一般机械臂、人形机器人都用数值解,阻尼最小二乘(DLS)
是工业界主力,靠 在奇异附近稳住伪逆。 - 雅可比是核心:数值 IK 的核心是雅可比矩阵——它把"关节怎么动"和"末端怎么动"联系起来。手算雅可比容易出错,工程上更常用 MuJoCo 的
mj_jacSite直接拿,并用同样的"和物理引擎对齐"思路做交叉校验。 - IK + PD 的串联结构:IK 输出关节目标角,PD 把它变成力矩,构成机器人学最基本的 Task-space → Joint-space → Torque 三层级联。两条工程经验:(1) 上一步的
作为下一步 IK 的热启动,避免跳到另一组解;(2) IK 频率(约 200 Hz)可以低于 PD(约 1 kHz),真机控制栈通常这样配。 - 三个 MuJoCo 实验串起来:§3.7 画圆验证光滑轨迹跟踪、§3.8 走三角形暴露角点处的控制带宽、§3.9 在 viewer 里用绿球(目标)+ 红球(当前末端)实时观察 DLS 收敛,便于排查"追不上"到底是 IK 还是 PD 的锅。这套调试范式会在 §4 四足、§5 抓取里反复用到。
动手任务
§3.8 让平面臂走了个抽象三角形,§3.9 又把绿球(目标)和红球(当前末端)叠到了 viewer 里。本章动手任务把这两件事各往物理意义上推一格:三角形的三个顶点变成 touchdown / standing / liftoff,中间补一段 mid-swing 抛物线——这就是 Raibert 三角,四足所有步态的原子动作。轨迹接到 §2 那条 Pupper 真腿(用 <weld> 把 hip 挂在空中),DLS IK + §1 的 PD 闭环跑起来。§5 的 trot 步态就是"这条腿 × 4 + 相位偏移",提前在这里把原子动作打磨好。
Pupper 单腿悬空踏步。前 6 秒是完整的 Raibert 三角:stance 沿 fk_leg(q) 在 IK 解出的关节角处的足端预测,两个球贴得有多紧,DLS 就收得有多干净。
要做的四件事:
- 在
scene.xml加<weld body1="hip" body2="world" relpose=...>把腿挂起来;写raibert_foot_traj(t)的 stance / swing 分支和 mid-swing 抛物线 - DLS 一步迭代:
mj_jacSite取 foot 的平移雅可比 + 阻尼伪逆,50 步内残差 m - 闭环:每帧 目标 → IK → PD →
mj_step,viewer 叠绿球 / 红球;连跑 8 秒看 base z 标准差是 0 - Stretch:
step_length从 0 线性扫到 0.12 m,看"原地踏步"渐变成"D 字形迈步"——给 §5 trot 留个伏笔
完整 starter / 测试 / 交付清单见 exercises/lab_3_stepping/。
参考资料
- CS123 Lab 3 & Lecture 4(IK 章节)
- Buss, "Introduction to Inverse Kinematics with Jacobian Transpose, Pseudoinverse and Damped Least Squares methods"