1. 执行器与 PD 控制
本章目标
- 理解位置误差、速度误差、P 增益、D 增益各自在干什么
- 能在 MuJoCo 里把一个 hinge 关节从任意初始角度稳定控制到目标角度
- 能画出一张关节角随时间的响应曲线,并解释过冲 / 欠阻尼 / 稳态误差
- 知道为什么工业上几乎所有执行器最低层都是 PD / PID
前置阅读
- 仿真与可视化 · MuJoCo 快速上手
- 想更直观理解,可以点击 交互模式 学习
1.1 执行器
执行器(Actuator) 是机器人技术中的核心组件,可以被直观地理解为系统的“肌肉”。它的核心作用是将某种形式的能量(电力、液压、气压等)转化为物理运动,从而改变受控对象的状态(例如让机器人能够行走、抓取等)。
1.1.1 工作原理
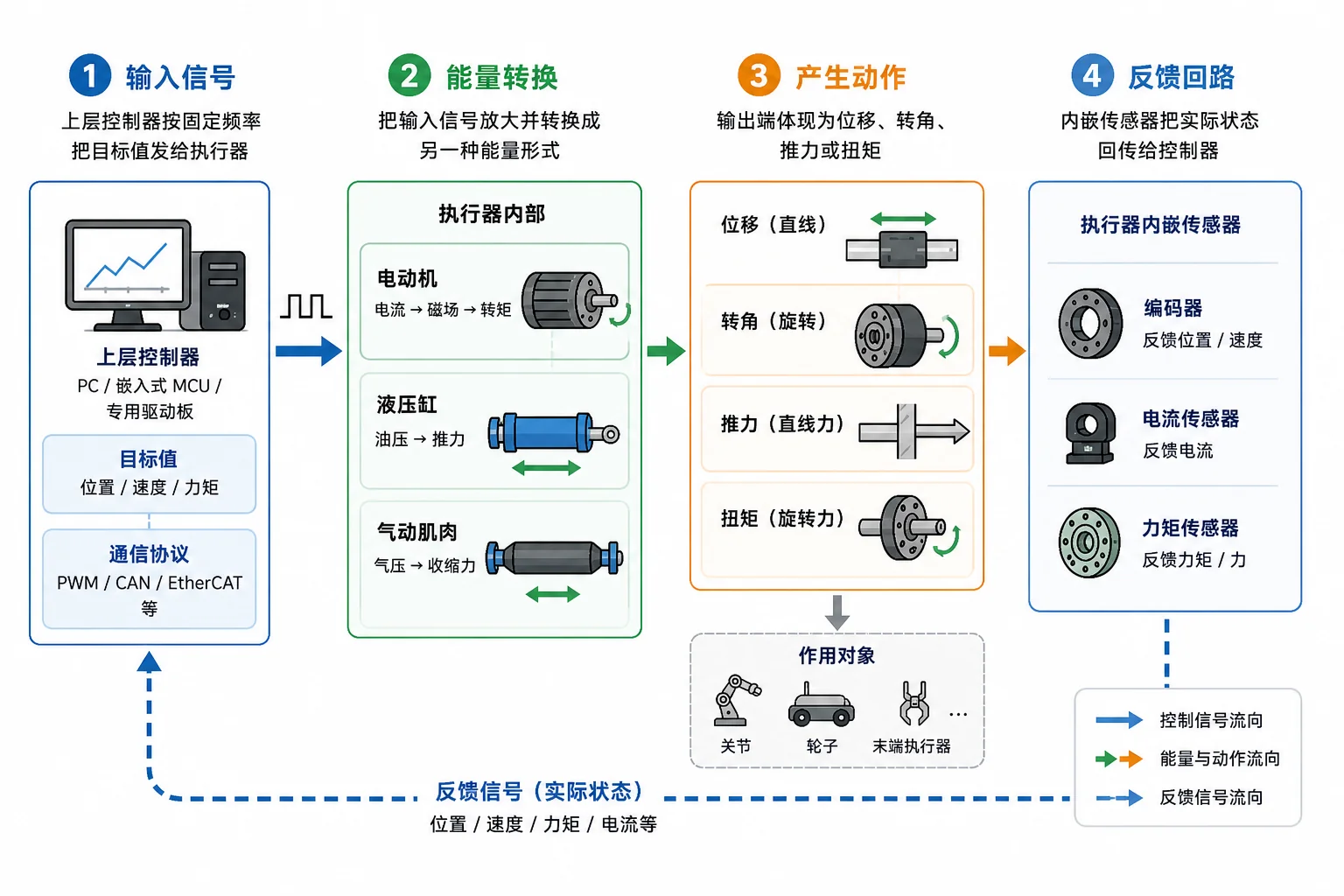
执行器的基本原理是把弱电指令放大成机械动作,再通过传感器把实际状态回传给控制器。可以拆成四步:
- 输入信号:上层控制器(PC、嵌入式 MCU 或专用驱动板)按固定频率把目标值(位置、速度或力矩)发给执行器,常见承载是 PWM、CAN、EtherCAT 等不同协议。
- 能量转换:执行器内部机构把输入信号放大并转换成另一种能量形式——电动机把电流经磁场转成转矩,液压缸把油压转成推力,气动肌肉把气压转成收缩力。
- 产生动作:输出端体现为位移、转角、推力或扭矩,直接作用在关节、轮子或末端执行器上。
- 反馈回路:现代执行器几乎都内嵌编码器、电流传感器或力矩传感器,把实际状态回传给控制器,便于构成反馈回路。
1.1.2 执行器分类
按能量来源,常见执行器可以分成三大类,如表 1 所示:
| 类别 | 代表 | 典型场景 | 特点 |
|---|---|---|---|
| 电动 | 有刷直流、无刷直流(BLDC)、步进 | 机械臂、足式机器人、无人机 | 控制精度高、响应快,具身智能场景里的绝对主流 |
| 液压 | Boston Dynamics Atlas | 重载、高爆发 | 功率密度最高,但贵、漏油、噪声大 |
| 气动 | 软体抓手、McKibben 人工肌肉 | 柔性操作、仿生 | 轻、便宜、本征柔顺,但控制精度差 |
电动执行器结构简单、控制精度高、响应快,配合编码器和现代电流环能做到毫秒级的位置 / 速度 / 力矩控制,是具身智能场景里的绝对主流,从机械臂到足式机器人几乎都选这条路。
液压执行器靠高压油驱动活塞,功率密度比电机高出一个数量级,能扛重载和瞬时冲击;代价是系统复杂、贵、容易漏油、噪声大,只在 Atlas 这类对功率密度极致追求的平台上才常见。
气动执行器用压缩空气驱动,本征柔顺、便宜、轻,适合软体抓取和仿生肌肉;但空气可压缩性大,闭环控制精度差,难以做到亚毫米级定位。
电动执行器又分为有刷直流、无刷直流(BLDC)、步进电机和伺服电机等类型,其中无刷直流以其高效率、长寿命和低维护需求成为现代机器人设计的首选,如图 2 所示:

1.1.3 齿轮箱
齿轮箱(Gearbox),在机器人和机械工程领域通常被称为减速器(Reducer)或传动装置,我们可以把它直观地理解为机器人的变速自行车齿轮系统。
它的核心功能是:连接在动力源(如电机)和执行端(如机械臂关节、车轮)之间,通过内部不同大小齿轮的物理啮合,来改变旋转的“速度”和“扭力(扭矩)”。
机器人之所以几乎离不开它,是因为 BLDC 等常见电机"转得快、力矩小"(几千 RPM、零点几 N·m),而关节需要的是"慢而有力"(十几 rad/s、几 N·m 到几十 N·m),中间必须经过一级换算:
其中各符号含义如下:
:电机端输出的扭矩(N·m)与角速度(rad/s) :经齿轮箱减速后关节端的扭矩与角速度 :减速比(Gear Ratio),电机端转速与关节端转速的比值,机器人关节常见 6:1 ~ 160:1 :传动效率(Efficiency),输出功率 / 输入功率,行星齿轮约 90%、谐波减速器约 70 ~ 80% :电机转子的转动惯量(kg·m²) :反射惯量(Reflected Inertia),电机转子惯量经齿轮箱放大后等效到关节端的值
一套减速比为
1.2 控制系统
控制是一个宏观的概念,它描述的是为了使系统的输出达到期望的状态,而对系统输入进行干预的过程。换句话说,它的核心任务是解决:“我们该给执行器下达什么样的指令,才能让物理对象变成我们想要的样子?”。常见的控制方法包括开环控制和闭环控制,其中闭环控制又被称为反馈控制,因为它依赖于系统状态的实时反馈来调整输入。
1.2.1 开环控制
开环控制(Open-loop Control) 的控制量只依赖目标
家用洗衣机、微波炉、按预设脉冲数旋转的步进电机都是典型代表——指令序列在程序里写死,执行端实际走到哪里不会反过来影响后续动作。
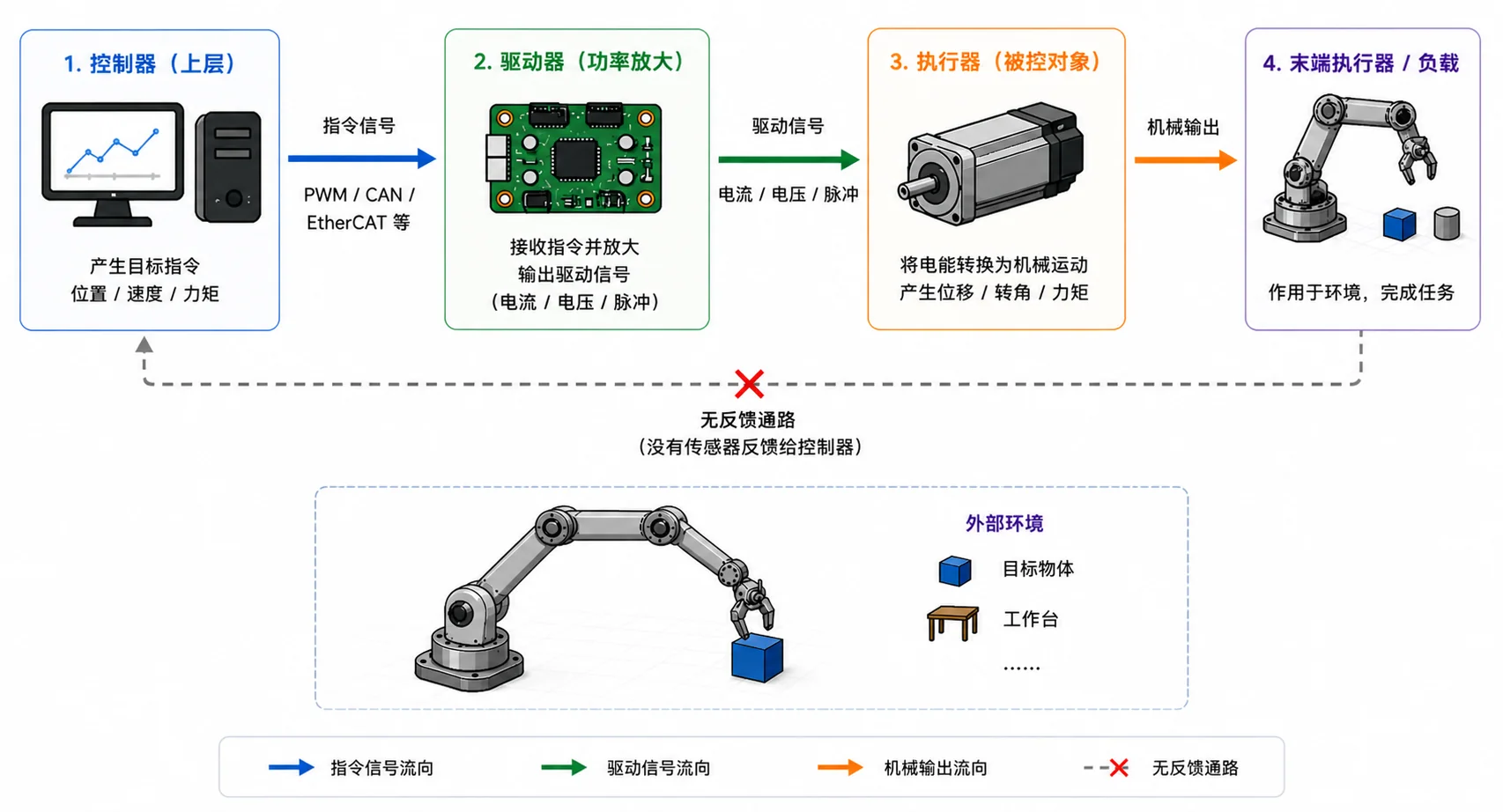
开环控制的优点是简单,不需要传感器建立反馈通路。但缺点是无法适应任何外界扰动,例如机械臂收到"转到 90°"的开环指令,一旦碰到摩擦、负载或障碍物,就会停在偏离 90° 的位置,并且不会自我修正。
1.2.2 闭环控制
闭环控制(Closed-loop Control) 又称反馈控制(Feedback Control),控制量根据实测误差
每个采样周期,传感器测出当前
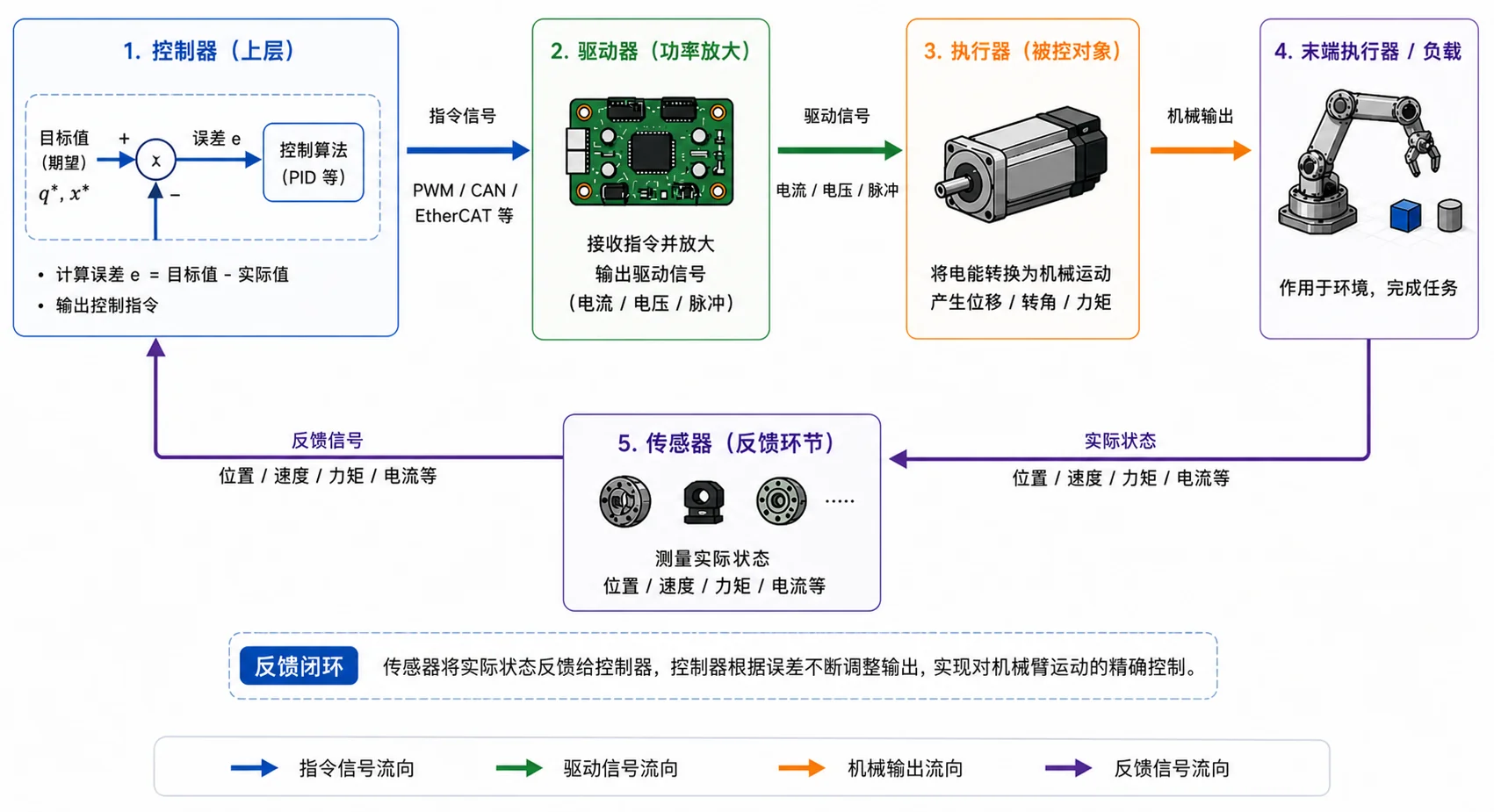
闭环的关键能力是自我纠错:扰动来自哪里并不重要——多挂了 1 kg 负载、电池电压跌了、桌面把关节顶了一下,只要它表现为偏离目标的
后续讨论的 Bang-Bang 和 PID 控制都属于闭环控制的范畴,区别在于它们对
1.3 Bang-Bang 控制
Bang-Bang 控制(又称双位控制或开关控制)是闭环控制里最简单的一种,核心公式如式
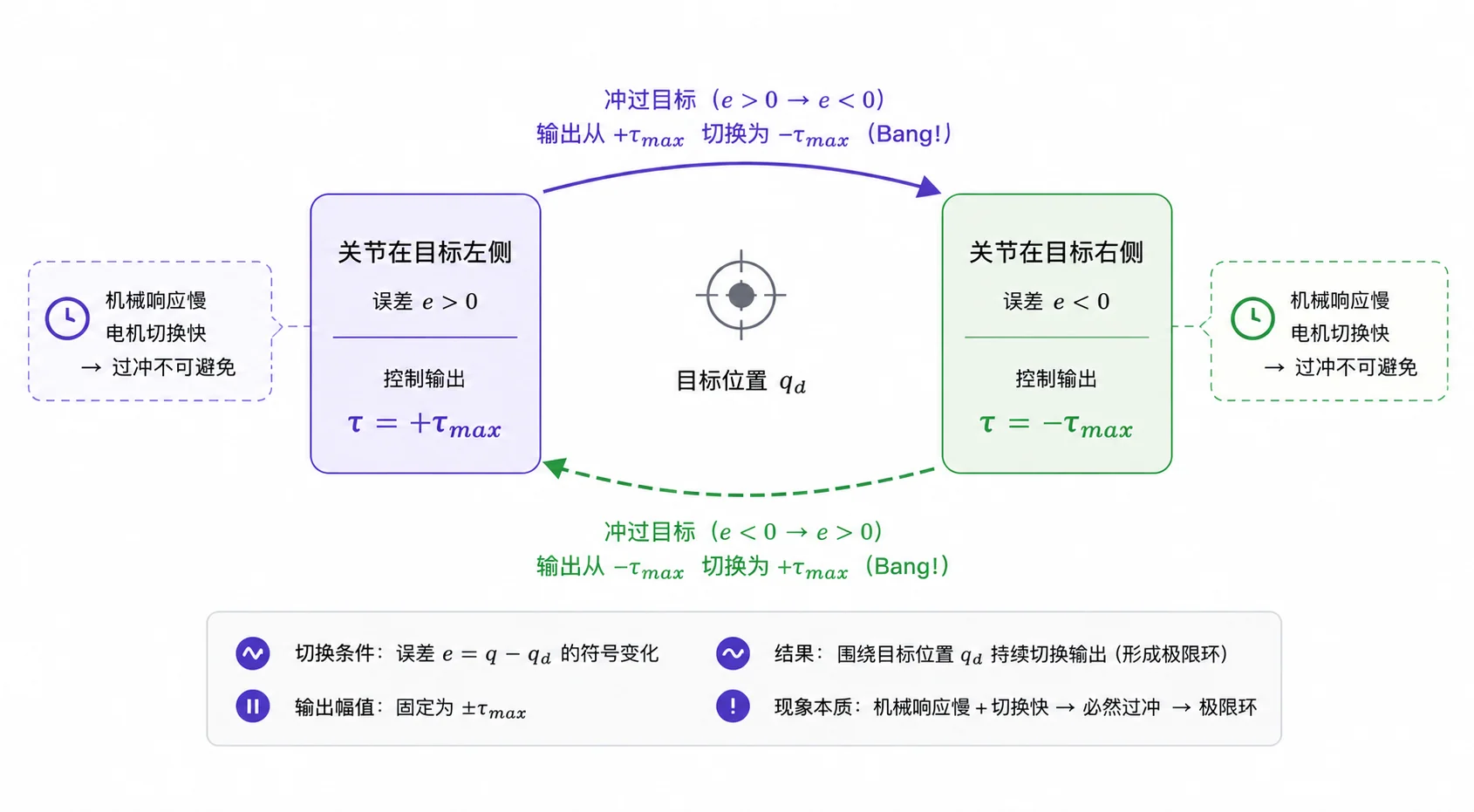
Bang-Bang 的逻辑是:只看误差
类比开车,油门和刹车各有一个踏板——要么踩到底,要么完全松开。每当系统穿越目标点,执行器在极短时间里从
尽管听上去很粗暴,但只要被控对象足够"慢",Bang-Bang 就是最便宜也最可靠的解。家用空调是最直观的例子:室温低于设定 → 开压缩机 → 升温到设定上方一两度 → 关压缩机 → 自然耗散 → 跌回设定下方 → 再开。整个循环以分钟为单位,开 / 关切换瞬间的小幅温度波动我们完全察觉不到,反而节约了复杂的传感器和调参成本。
总的来说,当被控对象的响应时间远大于切换抖动的时间,Bang-Bang 就是最优解。
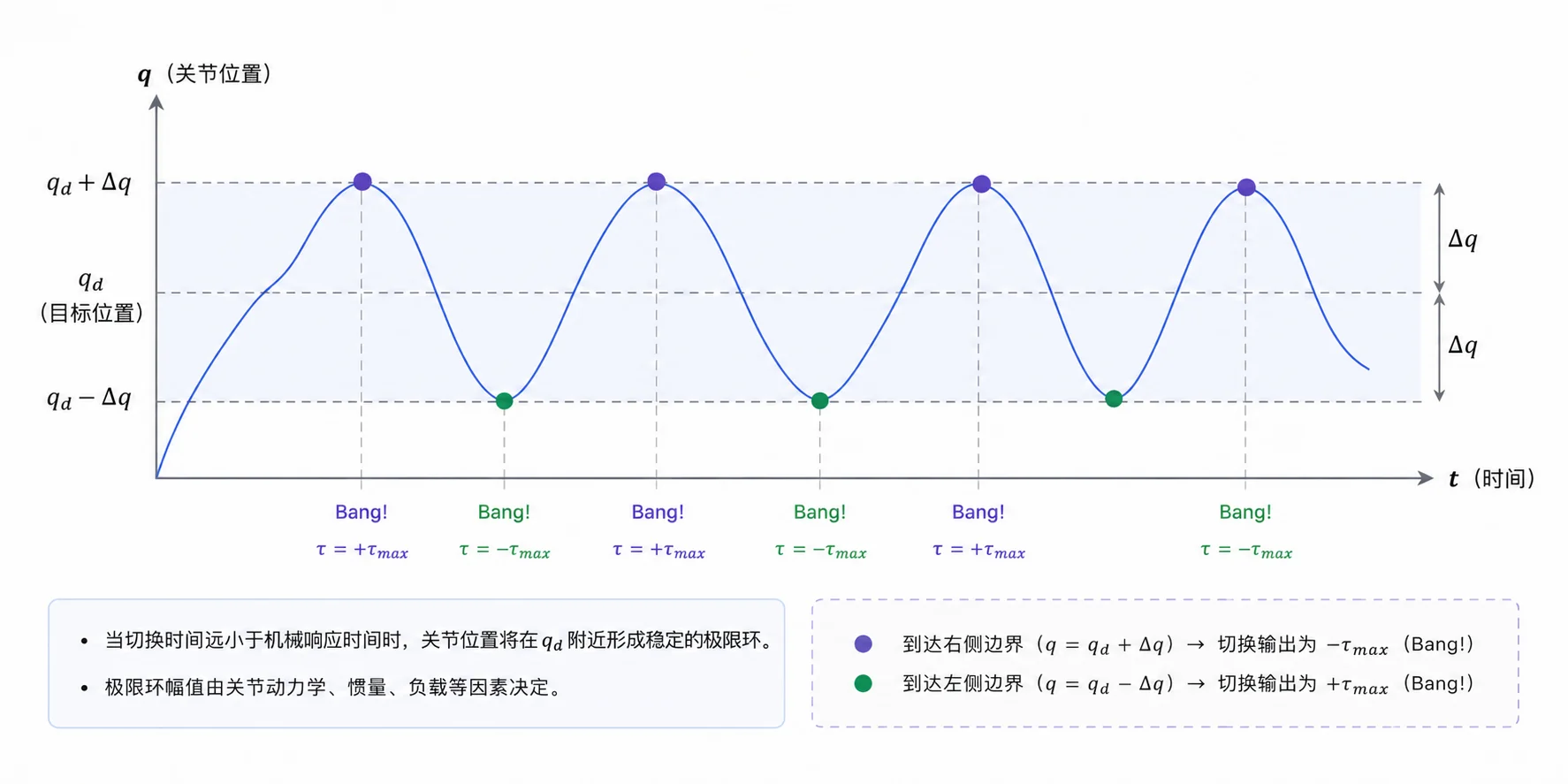
然而,在机器人控制场景中,一个轻量化关节的机械时间常数往往只有几十毫秒,电机扭矩切换却几乎是瞬间,两个时间尺度倒了过来。此时,Bang-Bang 就会在目标附近形成一个极限环(Limit Cycle),关节永远停不下来,电流也在
1.4 PID 控制
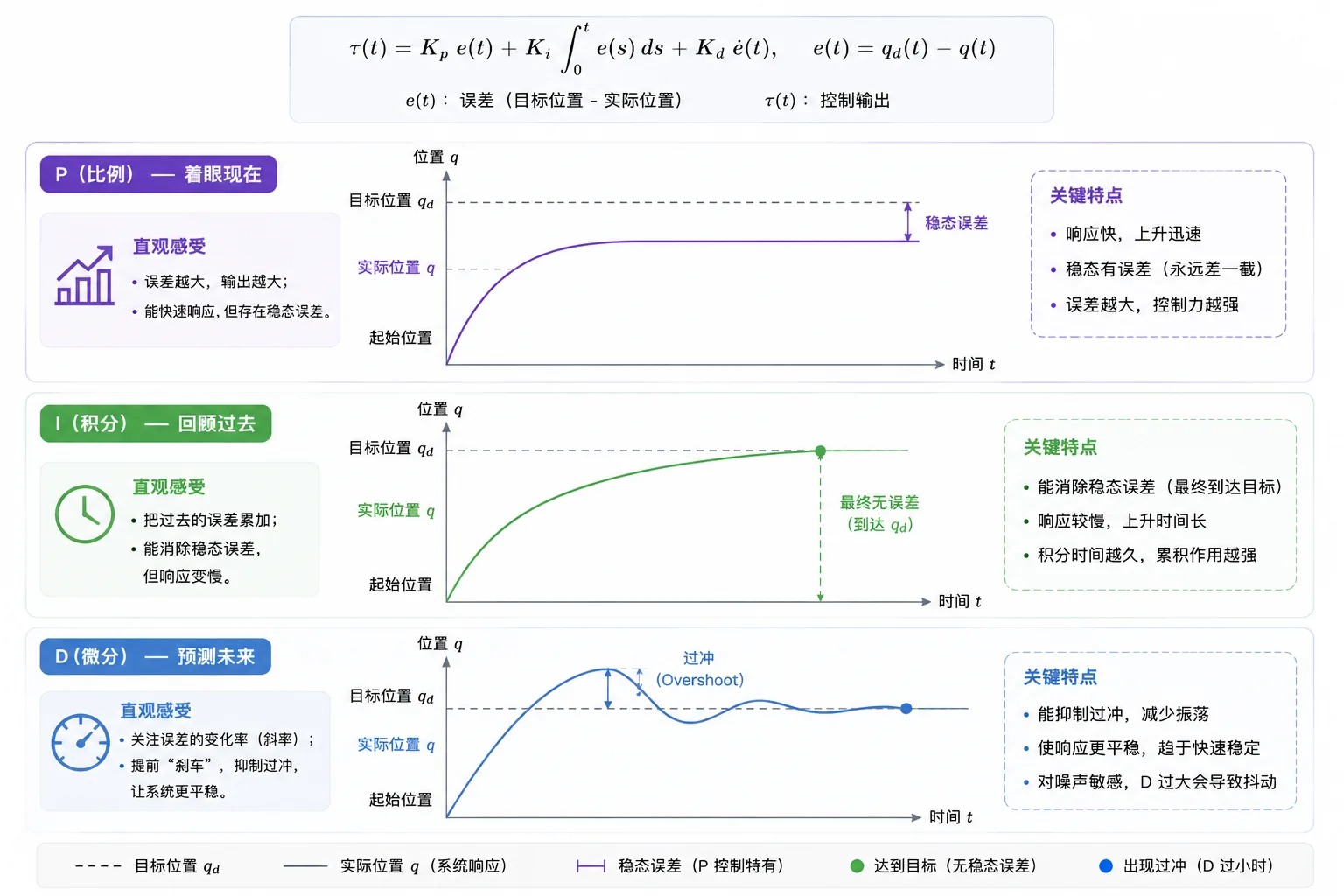
PID 控制(Proportional-Integral-Derivative Control)是工业控制领域应用最广泛、最经典的一种反馈控制算法,其核心公式如式
具体来说,PID 控制可以拆开成三个分量,每一项分别对应当前、过去和未来的误差。可以想象我们在驾驶汽车并试图停在一条精准的白线上:
1. 比例(Proportional,P) —— "当前的误差"
- 逻辑:误差越大,输出越大。
- 在车里:离白线还有 10 米,就大脚踩油门;离白线还有 1 米,就轻踩油门。
- 缺点:仅靠 P 无法消除静差。当车子非常靠近白线时,输出变得极小,可能由于摩擦力,车子还没到白线就停下了。
2. 积分(Integral,I) —— "过去的累积误差"
- 逻辑:只要误差一直存在,输出就会随时间不断累加,直到误差消失。
- 在车里:如果车子卡在离白线 10 厘米的地方不动了,积分项会感知到"误差一直存在",缓慢增加油门,直到车子最终压到白线上。
- 缺点:容易导致超调(Overshoot)。因为积分有惯性,当车子到达白线时,累积的动力可能还没撤销,导致车子冲过头。
3. 微分(Derivative,D) —— "未来的误差趋势"
- 逻辑:预测误差的变化趋势。误差减小得越快,它产生的"阻力"就越大,起到刹车的作用。
- 在车里:即使离白线还有一段距离,但如果当前速度非常快(误差减小得极快),微分项会命令我们"提前减速"或"踩刹车",防止冲过头。
- 缺点:对噪声非常敏感。如果传感器数据跳变厉害,微分项会产生剧烈的波动。
1.5 PD 控制
在工业与机器人控制里,真正启用积分项的场景其实并不多,主要原因包括积分饱和、弹簧-阻尼器的物理等效性、以及重力前馈的替代等因素,因此实际应用中 PD 控制反而更常见。
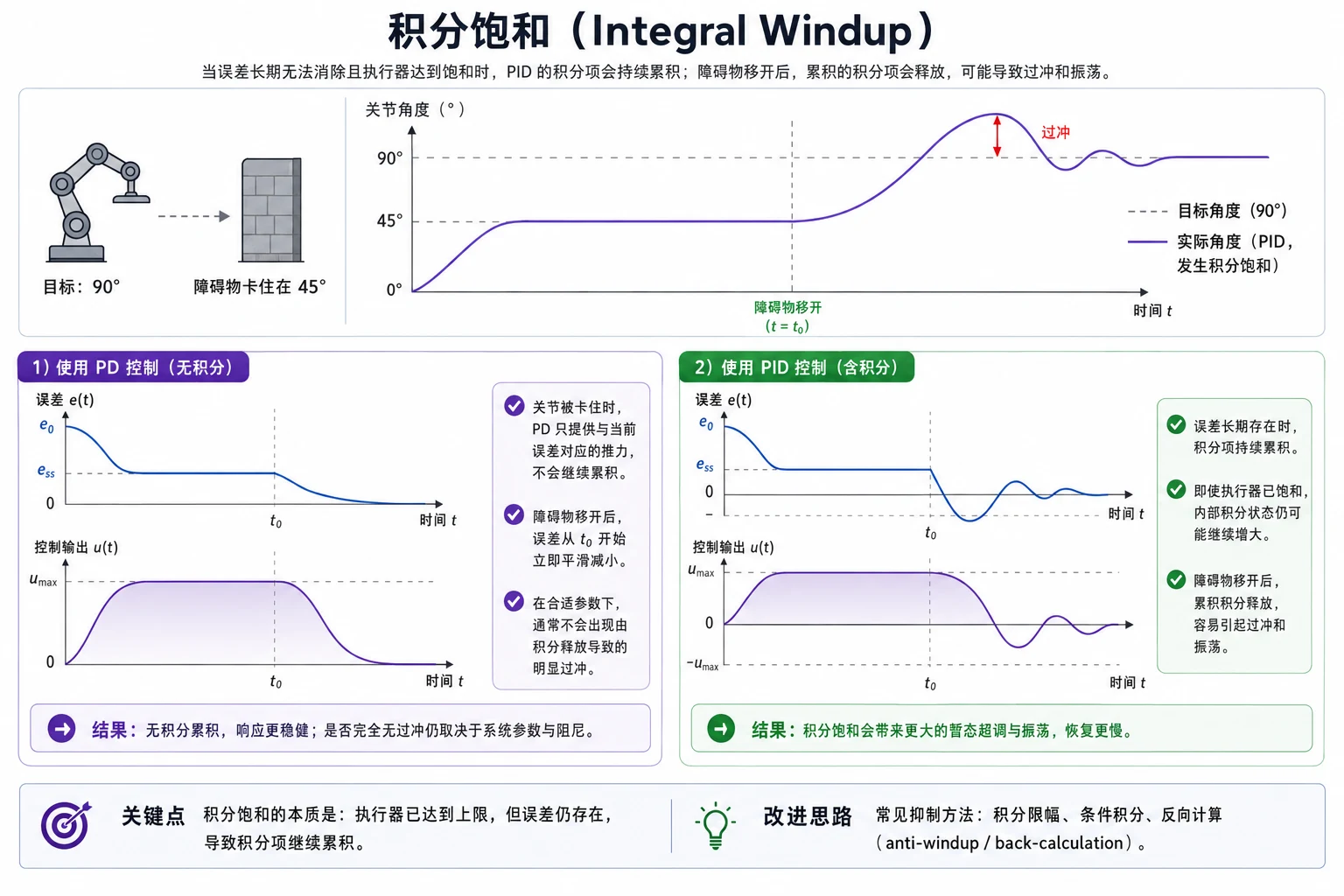
1.5.1 积分饱和
积分饱和(Integral Windup) 指当误差长时间无法消除时,积分项持续累加、最终远超执行器物理上限的现象。在纯数学模型里它只是个变大的数值,但在物理世界里执行器的力矩有上限,环境中又随处是障碍物——一旦误差被卡住,积分项就会进入失控状态,并在解除卡住的一瞬间集中释放。
设想一个关节目标角度是 90°,在 45° 时被桌面卡住:
- 使用 PD 时,关节会保持一个恒定推力(P 项相当于一根被拉伸的弹簧),安全地顶住障碍物。
- 使用 PID 时,只要误差一直存在,积分项就会持续累加,电机收到越来越大的力矩指令,直到硬件上限。一旦障碍物突然移开,累积的积分项瞬间释放,关节会以非常剧烈的姿态甩出去——既容易损坏机器人,也带来明显的人身安全风险。
1.5.2 弹簧-阻尼器
现代机器人控制非常看重柔顺性(Compliance)与物理交互的安全,而 PD 律可以严格等效为一组"虚拟弹簧-阻尼器":
对应虚拟弹簧的刚度(stiffness),越大关节越"硬"; 对应阻尼器的阻尼系数(damping),越大运动中的阻力越大、越不容易振荡。
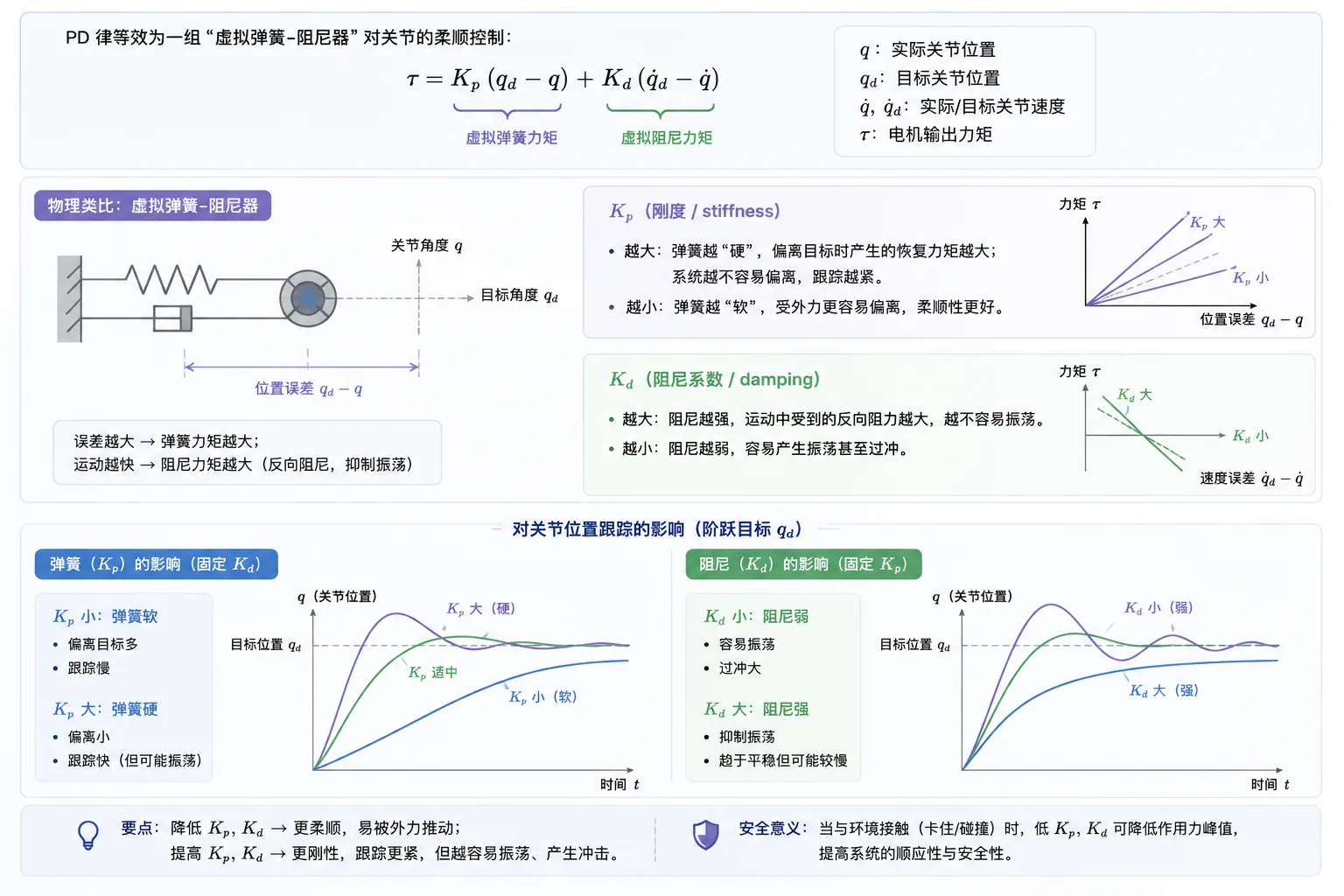
这种物理直觉让 PD 天然契合阻抗控制(Impedance Control)——希望机器人像人手一样柔软地抓取物体时,只需调低
1.5.3 动力学前馈替代积分
I 项在经典控制里的主要职责是消除稳态误差,而机械臂最主要的稳态误差来源正是重力(哪怕目标角度已经近在咫尺,重力也会一直把关节往下拉,纯 P 控制永远差一截)。现代机器人学并不依靠盲目累加误差来对抗重力,而是直接利用动力学模型(Dynamics Model)精确计算,这就是计算力矩控制(Computed Torque Control),在 PD 的基础上加上一层动力学前馈:
是重力补偿项,根据当前位姿直接算出抵消重力所需的力矩; 是惯性矩阵与科氏力前馈。
既然稳态误差已经被精确的物理模型吃掉,积分项就变得可有可无,甚至只会额外引入相位滞后与不稳定性。
1.5.4 PD 调参
尽管 PD 律里只有两个参数
我们可以用理论分析来指导调参,为此先用最简化的单关节模型:把关节看作一个绕固定轴转动的刚体,转动惯量为
其中
重新整理一下,这其实就是一个二阶线性系统,如式
和高中物理里"弹簧-阻尼器"的方程一模一样,
就是弹簧刚度——把关节往 拉回去,越大越"硬"。 就是阻尼系数——消耗动能,越大越"黏"。
由此可以直接写出两个控制工程里绕不开的量,如式
| 行为 | 直观 | |
|---|---|---|
| 欠阻尼(underdamped) | 冲过目标来回晃 | |
| 临界阻尼(critical) | 最快、不过冲 | |
| 过阻尼(overdamped) | 不晃,但慢吞吞 |
总结来说,调参的朴素做法就是先把
1.6 MuJoCo 实现
理论部分到此为止,下面把公式 position 执行器看整体效果,再自己手搓 PD,把
1.6.1 执行器模型
MuJoCo 用 <actuator> 标签把控制信号 ctrl[i] 翻译成作用在关节上的广义力。对单关节 PD,有三种常见写法:
| 标签 | ctrl[i] 的含义 | 内部在算什么 |
|---|---|---|
<motor> | 直接的关节力矩 | 不做反馈,我们自己在 Python 里写 PD |
<position kp=.. kv=..> | 目标位置 | 内部自动算 |
<velocity kv=..> | 目标速度 | 内部算 |
- 如果我们想看清 PD 每一项、方便画曲线,用
motor+ 自己写反馈。 - 如果我们只是想让关节稳定跟踪到某个角度,用
position(写起来最短,也是 Pupper / 机械臂最常见的配置)。 velocity在轮式底盘、转速环里更常见。
本章我们两种都写一遍:先用 position 看效果,再用 motor 自己手搓 PD,把
1.6.2 单摆 PD
这一节搭一个最小能跑的 PD 例子,只要两份文件:pendulum.xml 描述物理,pd_single_joint.py 给执行器写 ctrl。我们故意在同一个 MJCF 里同时留下两种 PD 写法,Python 里靠一个开关切换,方便我们亲眼对比"MuJoCo 内置的 position 执行器"和"自己手搓的 motor + PD"是同一件事。
把下面这段存成 pendulum.xml:一根 0.5 m 长的杆子通过 hinge 挂在世界坐标系上,绕 <actuator> 里写了两个:
pos_act(写法 A):调用 MuJoCo 内置 PD,参数就是kp / kv。tor_act(写法 B):纯力矩通道,PD 留给 Python 手算后再写进来。
<mujoco model="single_pendulum">
<!-- 重力沿 z 轴向下; timestep=0.002 表示每 2 ms 推进一次物理仿真 -->
<option gravity="0 0 -9.81" timestep="0.002"/>
<worldbody>
<!-- body 原点放在世界坐标 (0,0,1); joint 未写 pos,默认就在这个原点 -->
<body name="link" pos="0 0 1">
<!-- hinge 只允许绕 y 轴转动; damping 是关节自身的物理阻尼,不是控制器的 Kd -->
<joint name="hinge" type="hinge" axis="0 1 0" damping="0.02"/>
<!-- fromto 是 body 局部坐标:胶囊中心线从 (0,0,0) 到 (0,0,-0.5),所以向下 0.5 m -->
<geom type="capsule" fromto="0 0 0 0 0 -0.5" size="0.04" mass="1"/>
</body>
</worldbody>
<actuator>
<!-- 写法 A: position 执行器。ctrl[0] 填目标角度 q_des;kp 对应 Kp,kv 对应 Kd 的速度阻尼项 -->
<position name="pos_act" joint="hinge" kp="20" kv="1" ctrlrange="-3.14 3.14"/>
<!-- 写法 B: motor 执行器。ctrl[1] 直接填关节力矩 tau,PD 公式由 Python 手算 -->
<motor name="tor_act" joint="hinge" ctrlrange="-5 5"/>
</actuator>
</mujoco>
对应的脚本 pd_single_joint.py 主循环就三件事:读 qpos / qvel → 算 PD → 写 ctrl,再交给 mj_step 推进物理。顶上的 use_motor 决定走哪一种写法,默认 True 即写法 B;这时要先把 pos_act 的增益清零,否则两个执行器会同时往关节上叠力矩,看到的就不是单一 PD 的响应。
from pathlib import Path
import time
import mujoco
import mujoco.viewer
import numpy as np
model = mujoco.MjModel.from_xml_path(str(Path(__file__).with_name("pendulum.xml")))
data = mujoco.MjData(model)
q_des = 0.8 # 目标角度(rad),约 45.8°; position 执行器和手写 PD 都跟踪这个目标
Kp, Kd = 20.0, 1.0 # 手写 PD 的比例/微分增益;刻意与 XML 里的 kp/kv 一致,方便对照
use_motor = True # True: 写 ctrl[1],用 motor 手搓 PD; False: 写 ctrl[0],用 position 执行器
if use_motor:
# MJCF 里同时定义了 pos_act 和 tor_act。
# 如果不关掉 pos_act,它会继续按 ctrl[0] 输出内置 PD 力矩,
# 这样就变成"内置 PD + 手写 PD"叠加,无法单独观察 motor 写法。
pos_act_id = mujoco.mj_name2id(model, mujoco.mjtObj.mjOBJ_ACTUATOR, "pos_act")
model.actuator_gainprm[pos_act_id, :] = 0.0 # 清掉 position 执行器的 kp 增益
model.actuator_biasprm[pos_act_id, :] = 0.0 # 清掉 position 执行器的 kv/偏置项
log = []
with mujoco.viewer.launch_passive(model, data) as viewer:
while viewer.is_running() and data.time < 8.0:
step_start = time.time()
q = data.qpos[0] # hinge 当前角度 q,对应 XML 里唯一的 joint
dq = data.qvel[0] # hinge 当前角速度 dq/dt
if use_motor:
# motor 模式:自己计算 tau = Kp(q_des - q) + Kd(0 - dq)
# 目标速度设为 0,表示只要求最终停在目标角度,不要求持续运动。
tau = Kp * (q_des - q) + Kd * (0.0 - dq)
data.ctrl[1] = np.clip(tau, -5.0, 5.0) # 写入 tor_act;clip 对应 XML 的 ctrlrange="-5 5"
else:
# position 模式:只给目标角度,MuJoCo 在内部用 kp/kv 自动算出关节力矩。
data.ctrl[0] = q_des # 写入 pos_act;范围受 ctrlrange="-3.14 3.14" 限制
mujoco.mj_step(model, data)
viewer.sync()
log.append((data.time, q, dq, data.ctrl.copy()))
# 让仿真按 wall-clock 走,viewer 看起来才是实时的
dt_left = model.opt.timestep - (time.time() - step_start)
if dt_left > 0:
time.sleep(dt_left)
把上面的 XML 保存为 pendulum.xml,把 Python 代码保存为 pd_single_joint.py,两个文件放在同一个目录下,然后运行:
macOS:
mjpython pd_single_joint.py
Linux / Windows:
python pd_single_joint.py
跑起来会弹出 viewer,杆子从竖直向下摆到
1.6.3 实验:增益响应
只看 §1.6.2 里
把下面脚本保存为 pd_experiments.py,和 pendulum.xml 放在同一个目录下。它不打开 viewer,直接跑 MuJoCo 物理并画出实验 1 / 实验 2 的曲线:
from pathlib import Path
import matplotlib.pyplot as plt
import mujoco
import numpy as np
q_des = 0.8
def make_model():
# 每组实验都重新加载一份 model,避免上一组仿真的状态或参数污染下一组。
model = mujoco.MjModel.from_xml_path(str(Path(__file__).with_name("pendulum.xml")))
# 这里统一使用 motor 通道手写 PD。
# 所以要关掉 XML 里同时存在的 position 执行器,否则会叠加两份控制力矩。
pos_act_id = mujoco.mj_name2id(model, mujoco.mjtObj.mjOBJ_ACTUATOR, "pos_act")
model.actuator_gainprm[pos_act_id, :] = 0.0 # 清掉 position 执行器的 kp
model.actuator_biasprm[pos_act_id, :] = 0.0 # 清掉 position 执行器的 kv/偏置项
return model
def run_pd(Kp, Kd, disturbance=False):
model = make_model()
data = mujoco.MjData(model)
ts, qs = [], [] # 只记录时间和角度,用于画响应曲线
while data.time < 8.0:
q = data.qpos[0] # 当前关节角度
dq = data.qvel[0] # 当前关节角速度
# 手写 PD:目标速度设为 0,所以 D 项是 Kd * (0 - dq)。
tau = Kp * (q_des - q) + Kd * (0.0 - dq)
# 写入 motor 执行器的 ctrl[1];clip 对应 XML 里的 ctrlrange="-5 5"。
data.ctrl[1] = np.clip(tau, -5.0, 5.0)
# 实验 2 使用:3 秒后施加恒定外扰,观察 PD 是否能消掉稳态误差。
data.qfrc_applied[0] = 2.0 if disturbance and data.time > 3.0 else 0.0
mujoco.mj_step(model, data)
ts.append(data.time)
qs.append(data.qpos[0])
return np.array(ts), np.array(qs)
plt.figure(figsize=(8, 4))
# 实验 1:固定 Kp,只改变 Kd,看欠阻尼 / 临界附近 / 过阻尼三种响应。
for Kd, label in [(0.5, "A: Kd=0.5"), (12.0, "B: Kd=12"), (40.0, "C: Kd=40")]:
t, q = run_pd(Kp=40.0, Kd=Kd)
plt.plot(t, q, label=label)
plt.axhline(q_des, linestyle="--", color="black", label="target")
plt.xlabel("time (s)")
plt.ylabel("q (rad)")
plt.legend()
plt.grid(True)
plt.tight_layout()
plt.savefig("pd_kd_sweep.png", dpi=200)
plt.figure(figsize=(8, 4))
# 实验 2:加入恒定外扰,对比纯 P 和 PD 的稳态误差。
for Kd, label in [(0.0, "P only"), (1.0, "PD")]:
t, q = run_pd(Kp=20.0, Kd=Kd, disturbance=True)
plt.plot(t, q, label=label)
plt.axhline(q_des, linestyle="--", color="black", label="target")
plt.axvline(3.0, linestyle=":", color="gray", label="disturbance")
plt.xlabel("time (s)")
plt.ylabel("q (rad)")
plt.legend()
plt.grid(True)
plt.tight_layout()
plt.savefig("pd_disturbance_error.png", dpi=200)
运行:
python pd_experiments.py
实验 1 用三组参数:
| 组 | 预期 | 现象 | ||
|---|---|---|---|---|
| A 欠阻尼 | 40 | 0.5 | ≈ 0.04 | 反复冲过目标来回晃 |
| B 临界附近 | 40 | 12 | ≈ 0.95 | 最快到达且基本不过冲 |
| C 过阻尼 | 40 | 40 | ≈ 3.16 | 单调爬升,但慢 |
(按 mj_fullM 读真实惯量。)
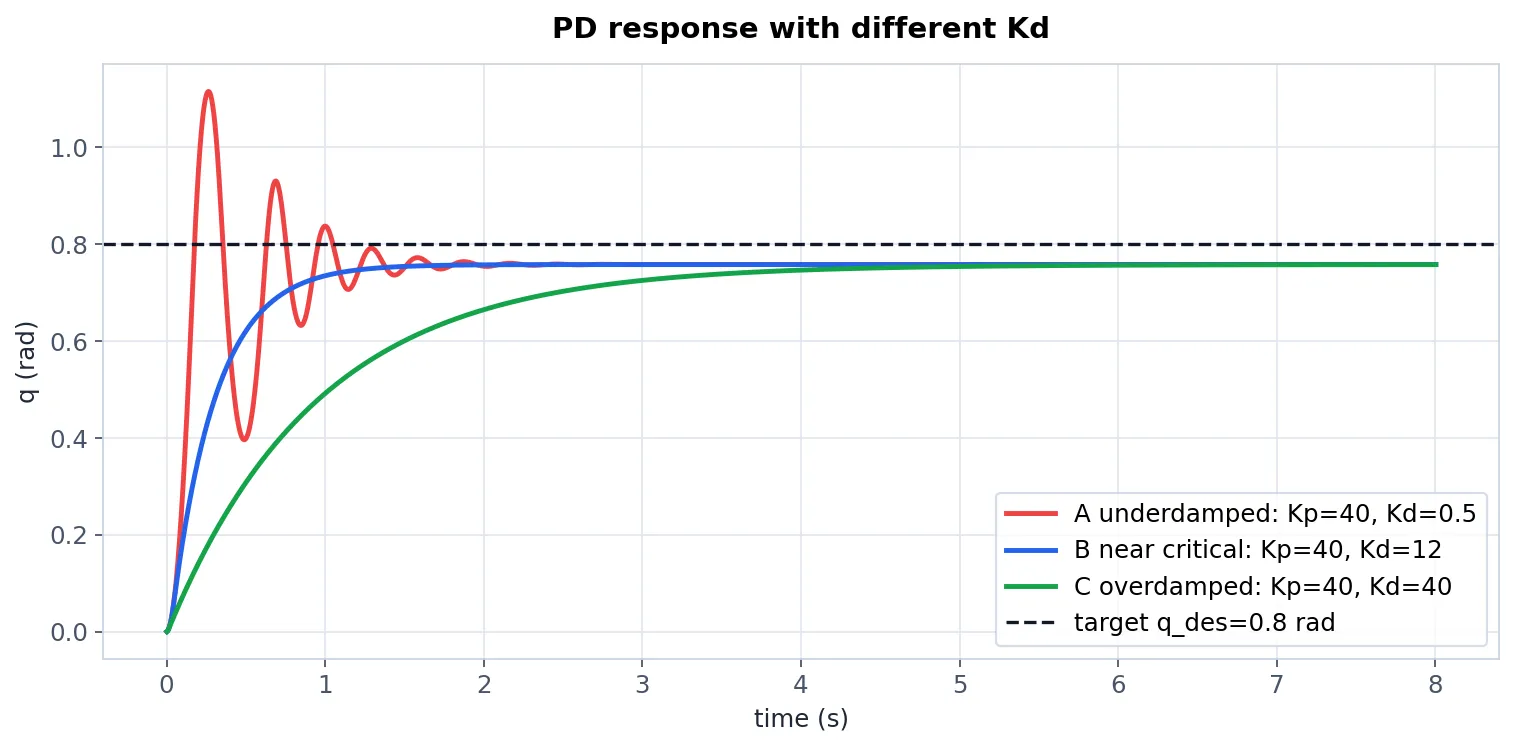
把三条曲线放在一起看,会更容易看出几个现象:
决定回正力矩的量级。 要先大到能抵消重力矩 ,单摆才能到达 附近;即便如此稳态仍会偏一截,这个偏差正是 §1.6.4 要拆解的稳态误差,调 不解决。 是控制器主动出的阻尼,跟 MJCF 里的 damping不是同一件事。后者是关节本身的物理阻尼,写在 XML 里、和控制器无关;想干净地观察的作用,就把 damping设小一点,避免两份阻尼混在一起。太大会让仿真先于真机崩。 加到某个值之后曲线出现高频噪声甚至发散,这是 timestep跟不上的信号,不是 PD 公式错了;把 timestep调小、或把减小,都能压下去。
1.6.4 实验:扰动误差
实验 2 用同一个 pd_experiments.py,只是在第 3 秒后给关节一个持续外力矩:
data.qfrc_applied[0] = 2.0 if disturbance and data.time > 3.0 else 0.0
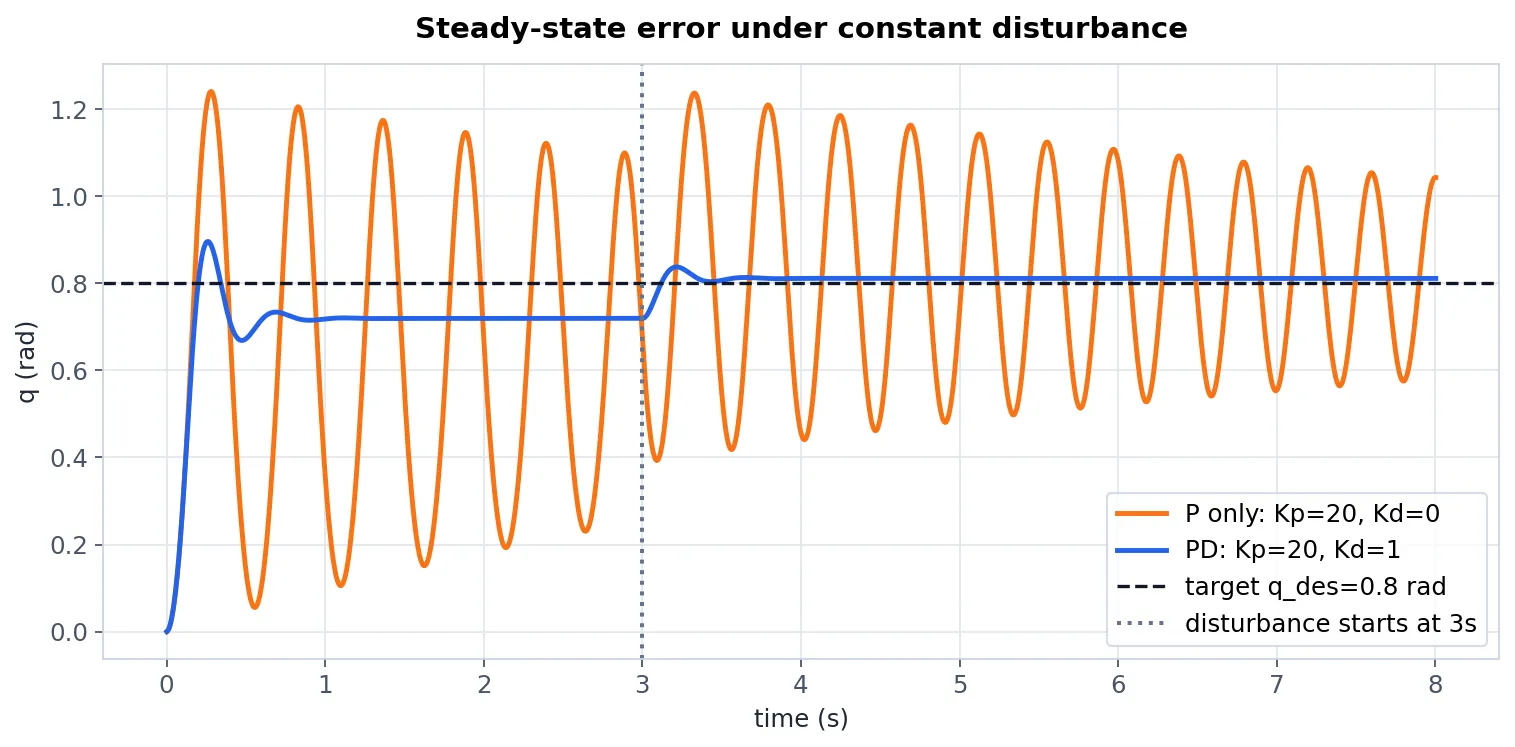
我们会看到两种明显不同的行为:
- 纯 P 控制(
):关节稳在一个偏离 的新位置上,差的那一截正好是 。这就是"稳态误差"。 - PD 控制:在 P 的基础上抖动更小地到达那个偏移位置,但稳态误差依然存在——因为误差一恒定,微分项就为 0,不产生额外的修正力。
想把这个偏差也消掉,就要引入积分项
小结
本章沿「执行器 → 控制系统 → Bang-Bang → PID → PD → MuJoCo 实现」走了一遍单关节最底层的反馈控制。几条值得带走的结论:
-
硬件决定了 PD 真正控的那个二阶系统。电机选型时看的是扭矩 / 速度 / 精度,但 PD 调参时真正起作用的是经齿轮箱放大的反射惯量
。准直驱(QDD) 与高减速比(谐波) 两条路线在 PD 表现上差异极大——sim-to-real 对不上,绝大多数出在这组数字而不是公式本身。 -
Bang-Bang → PID → PD 是连续松绑的同一条链。Bang-Bang 只看误差符号、输出
两档,在机器人关节上必然陷入极限环;P 把开关换成正比于误差的连续输出,留下稳态误差;I 累积过去误差吃掉稳态误差;D 预判误差变化、提前反向出力。三项各管时间的一个维度——当前、过去、未来。 -
机器人里实际用的是 PD 而非 PID,原因有三:积分饱和在物理世界里会演变成"卡住后突然甩出"的安全风险;PD 与虚拟弹簧-阻尼器严格等效,让阻抗控制 / 柔顺交互天然成立;机械臂主要的稳态误差来源是重力,可以靠动力学前馈精确消除,不必让 I 盲目累加。
-
PD 调参的骨架是把闭环看成二阶振子:
决定响应快慢, 决定阻尼。先按目标响应选 ,再按 算出 ,就能得到一个既不晃又不慢的响应;真机上还要叠加摩擦、传动间隙、采样延迟等修正。 -
MuJoCo 里
position执行器内部就是一条 PD(kp/kv),想看清 P 与 D 各自的贡献就用motor+ 自写 PD。timestep是物理步长而非控制周期,要对齐真机控制频率,得让 Python 循环每个 timestep更新一次ctrl。
到这里,我们已经能让一个单自由度关节稳定到达任意目标角度——这是后面所有内容的地基。§5 会把同一套 PD 同时套到四足机器人的全部关节上去拼出 trot 步态;再之后的 RL 步态、LLM 控制,本质上都在找一个更复杂的
思考
-
实验 1 里 A 组取
,响应曲线剧烈振荡。如果想保留 、把响应压成接近临界阻尼, 大概要取多少?(提示:先用 估单摆惯量,再代 。) -
一台准直驱(QDD)四足机器人减速比
,另一台协作机械臂用谐波减速器 ,两者电机本体惯量相同。如果把同一组 直接移植过去,响应会发生什么变化?为什么? -
§1.5.2 把
称为"阻尼系数",§1.6.3 又强调" 不是 MJCF 里的 damping"。这两个"阻尼"在物理上有什么区别?如果只在 MJCF 里把damping调大,能不能替代控制器里的? -
既然计算力矩控制可以用动力学前馈精确消掉重力带来的稳态误差,是不是任何机器人都可以彻底放弃 I 项?在哪些场景下我们仍然必须保留 I?
-
position执行器和motor+ 自写 PD 在数学上完全等价,但调试体验差别很大。如果我们想搞清某次过冲到底是太大、 太小,还是力矩饱和触发的,我们会优先选哪一种写法?为什么?
动手任务
到这里我们已经能让一个单关节 PD 稳定到达任意目标。组队 Lab 1 把同一个 PD 接到 Pupper HFE 关节上换到频域看一遍——用一系列正弦输入扫频,在 Bode 图上读出 §1.5 那对
HFE 关节跟踪 0.3 Hz 正弦目标:左侧是 Pupper 单腿响应,右侧是同一组数据实时打到 Bode 图上的两个点(一组幅值、一组相位)。低频
要做的四件事:
- 把 PD 接到
shared/models/leg.xml的 HFE 上,先用常值把腿稳住 -
mj_fullM读反射惯量,按 自动算 - 在
Hz 七点扫频,记录稳态幅值和相位差,画 magnitude / phase 双轴 Bode 图 - 找
dB 带宽——高频段曲线偏离一阶低通形状的部分,对应 §1.6.3 里的哪条坑?
完整 starter / 测试 / 交付清单见 exercises/lab_1_pid_bode/。