4. 搭建四足机器人
本章我们开始在 MuJoCo 里搭建四足机器人 Pupper v3 的 MJCF 模型,并理解它的结构组成和相关参数。
本章目标
- 说清楚 Pupper v3 的运动学结构:1 个
base_link+ 4 条对称的 3-DoF 腿,共 12 个驱动关节 - 在 pupper_v3_fixed.xml 里把 MJCF 两层结构(worldbody 内 5 元素 + 外部并列块,详见 §3.1 MJCF 元素一览)一一指认出来
- 用 view_pupper_v3_fixed.py 在本机跑通 viewer,看到机器人摆出
homekeyframe 的姿态 - 理解
<general biastype="affine">是怎么把 Kp/Kd 内嵌进 actuator 的,能改gainprm/biasprm看刚度变化 - 知道 fixed 模型与 floating 模型的唯一差别就是
<freejoint/>,并能在 floating 模型上让它"站住"
前置阅读
- 第 1 章 执行器与 PD 控制
- 第 2 章 正运动学
- 第 3 章 逆运动学
- 仿真与可视化 · MuJoCo 快速上手
- 仿真与可视化 · MJCF 元素一览
- 配套代码
4.1 Pupper 结构
Pupper v3 的骨架主要包括一个机身(torso)和四条结构对称的腿,每条腿是一条 3 段嵌套的串联链,从髋部往下数三个转动关节(HAA / HFE / KFE),如图 1 所示:

每条腿三个关节,从髋部到足端依次是:
| 缩写 | 关节名 | 旋转轴方向 | 直观作用 |
|---|---|---|---|
| HAA | hip abduction/adduction | 沿身体前后向(roll 轴) | 把腿往身体外掰 / 往内收 |
| HFE | hip flexion/extension | 沿身体左右向(pitch 轴) | 抬腿前后摆 |
| KFE | knee flexion/extension | 同 HFE 平行 | 弯小腿、调节足端高度 |
四条腿按"前左 / 前右 / 后左 / 后右"通常缩写成 FL / FR / RL / RR。机器人在仿真里通常以 floating base 的方式建模——机身有 6 个被动自由度(位置 3 + 朝向 3),再加上四条腿各 3 个驱动关节,总自由度如式
被动 base 的含义:机器人不能自己飞,机身这 6 个自由度没有 actuator,完全靠四条腿与地面接触间接受力。这点在写 PD 控制时要小心:
data.qpos前几维是 base 状态,不要当成关节角去 P 控制(§4.5 会展开具体索引)。
4.2 搭建 Pupper 仿真模型
pupper_v3_fixed.xml 在 <mujoco> 根节点下并列挂着几个顶层模块:
<mujoco>
├── <compiler> 编译选项: 弧度制, mesh 搜索目录
├── <option> 物理求解参数: 摩擦锥, impratio
├── <asset> STL mesh 和纹理的注册表
├── <default> joint / geom / actuator 的模板参数
├── <sensor> IMU 等虚拟传感器
├── <actuator> 12 路位置伺服, ctrl 顺序在这里定
├── <keyframe> 存档姿态, mj_resetDataKeyframe 一键恢复
└── <worldbody> 物理树: base_link + 4 条腿, 每条 3 段
<worldbody> 是物理骨架本体(§4.2.2),<asset> / <default> / <actuator> / <keyframe> / <sensor> 分别承担资源注册(§4.2.3)、默认参数(§4.2.4)、电机接口(§4.2.5)、初始姿态(§4.2.6)、传感器读数(§4.2.7);<compiler> 和 <option> 是编译与求解器选项,通常按默认值即可。
4.2.1 fixed 与 floating
打开配套代码目录,能看到本章准备了两份 MJCF:
- pupper_v3_fixed.xml:把
base_link焊在世界里,只留 12 个关节,方便先把腿单独调通。 - pupper_v3_floating.xml:在
base_link上加一行<freejoint name="world_to_body"/>,机身有 6 个被动 DoF,会受重力作用。
两者真正的差异只有这一行 freejoint,自由度总数因此不同:
先用 fixed 这份把每一块搭通——少了 freejoint 干扰,问题二分起来更直接;fixed 站得稳了再补 freejoint 改 floating(§4.4)。
关节命名规则("位置 + 编号")和限位:
| §4.1 关节 | 命名(按右腿) | 直观作用 | fixed.xml 限位(rad) |
|---|---|---|---|
| 第 1 轴(HAA) | leg_<front|back>_r_1 | 髋外展/内收 | [-1.22, 2.51](左腿镜像 [-2.51, 1.22]) |
| 第 2 轴(HFE) | leg_<front|back>_r_2 | 髋俯仰 | [-0.42, 3.14](左腿镜像 [-3.14, 0.42]) |
| 第 3 轴(KFE) | leg_<front|back>_r_3 | 膝关节 | [-2.79, 0.71](左腿镜像 [-0.71, 2.79]) |
四条腿对应 front_r / front_l / back_r / back_l,actuator 块里 12 个驱动器也是这个顺序——后面写 PD / RL 时,12 维数组一律按它对齐。整棵运动学树长这样:
base_link (fixed | freejoint)
┌──────────┬─────────┴──────────┬──────────┐
front_r_1 front_l_1 back_r_1 back_l_1 ← HAA
│ │ │ │
front_r_2 front_l_2 back_r_2 back_l_2 ← HFE
│ │ │ │
front_r_3 front_l_3 back_r_3 back_l_3 ← KFE
│ │ │ │
foot_site foot_site foot_site foot_site
每条腿末端挂 leg_<...>_3_foot_site——读足端位置 / 做 IK / 检测触地都靠它;机身上额外挂 body_imu_site,§4.2.7 的 sensor 块就是从这里读 IMU。
4.2.2 搭运动学树
骨架放在 <worldbody> 里。这里最容易卡住的一点是:MJCF 不像 URDF 那样写一堆 parent / child,它更直接,谁写在谁里面,谁就是谁的子节点。所以读 MJCF 的时候,不要一上来盯着数字看,先看缩进。
把 <body> 暂时理解成"一段刚体 + 一个局部坐标系",这段代码的骨架大概就是这样:
worldbody
└── base_link 机身,fixed 版本里固定在世界坐标中
└── leg_front_r_1 前右腿第 1 段,对应 HAA
└── leg_front_r_2 前右腿第 2 段,对应 HFE
└── leg_front_r_3 前右腿第 3 段,对应 KFE
└── foot_site 足端标记点
下面这段截自 fixed.xml 的"机身 + 前右腿髋部"。它刚好把 §3.1.2 里那 5 个元素串在了一起:
<worldbody>
<body name="base_link" pos="0 0 0.13">
<inertial pos="0.025 0 0.015" mass="1.506"
diaginertia="0.00854 0.0085 0.00236"/>
<geom type="box" size="0.045 0.064 0.130" class="collision"/>
<geom type="mesh" mesh="BodyV4v70_001" group="1"
contype="0" conaffinity="0"/>
<body name="leg_front_r_1" pos="0.075 -0.0835 0"
quat="0.707105 0.707108 0 0">
<inertial pos="0 0 0" mass="0.18"
diaginertia="7.4e-5 5.8e-5 4.8e-5"/>
<joint name="leg_front_r_1" axis="0 0 1" range="-1.22 2.51"/>
<geom type="mesh" mesh="LegAssemblyForFlangedv26_001"
group="1" contype="0" conaffinity="0"/>
<!-- ... 嵌套 leg_front_r_2 / leg_front_r_3, 末端挂 <site name="..._foot_site"/> ... -->
</body>
</body>
</worldbody>
这段 XML 真正要读的东西不多。
base_link 是机身。pos="0 0 0.13" 表示它在世界坐标系里离地 0.13 m。fixed 模型里没有 <freejoint/>,所以这个机身会固定在这里,不会像 floating 模型那样受重力掉下来。
leg_front_r_1 写在 base_link 里面,所以它是机身的子 body。pos="0.075 -0.0835 0" 是髋部安装点:x 为正,说明在机身前面;y 为负,说明在右侧。后面三条腿也是同一个套路,只是把这个根位置镜像到左边或后面。
joint 写在 leg_front_r_1 里面,意思也很直接:这段 body 可以相对父 body 转动。range="-1.22 2.51" 是关节限位,单位是弧度。inertial 则是这段腿的质量和惯量;仿真里它转起来轻不轻、受力后加速快不快,都跟这里有关。geom 负责形状,不过 Pupper 这里把"看起来的形状"和"碰撞用的形状"拆开了,后面马上说。
真正容易读错的是 axis。axis="0 0 1" 不是世界坐标系的 Z 轴,而是当前 body 局部坐标系里的 Z 轴。偏偏 leg_front_r_1 上还有一个 quat="0.707105 0.707108 0 0",它会先把这个局部坐标系转一下,再让 joint 绕局部 Z 轴转。所以判断关节到底朝哪个方向转,不能只看 axis,还得把 body 上的 quat 一起看。
套到前右腿上,可以这么想:
base_link 坐标系
└─ pos 把髋部平移到机身右前方
└─ quat 先旋转髋部局部坐标系
└─ joint axis="0 0 1" 在这个旋过的局部坐标系里定义转轴
quat 单独拆一下
quat 是 quaternion(四元数)的缩写,用来描述这段 body 的局部坐标系相对父 body 转了多少。它不是关节角,也不会被电机控制;模型加载时它就固定在那里,相当于装配机器人时先把这段零件拧到某个朝向。
MuJoCo 里的 quat 顺序是 (w, x, y, z)。如果暂时不想背四元数,可以只记这个读法:
这里
quat="0.707105 0.707108 0 0"
这四个数基本就是 (0.7071, 0.7071, 0, 0),也就是:
w ≈ cos(45°)
x ≈ sin(45°)
y = 0
z = 0
所以它表示"绕 X 轴转 90°"。为什么是 90°?因为四元数里存的是半角,45° × 2 = 90°。
这也是为什么 fixed.xml 里很多 joint 都写 axis="0 0 1",但实际看起来并不是都绕同一个方向转:它们所在 body 的 quat 不一样,局部 Z 轴已经被提前摆到不同方向了。
Pupper 这份模型有几处实现细节,读代码时顺手记住就行:
- 12 个关节都是
hinge,也就是单轴转动。每个<joint>里只写axis和range,armature/damping/frictionloss这些通用参数放到 §4.2.4 的<default>里统一兜底。 - 精细 STL mesh 只负责渲染,不参与碰撞,所以会看到
contype="0" conaffinity="0" group="1"。真正做碰撞的是另一套简化几何体:机身用box,大腿用cylinder,足端用sphere。这样仿真快很多,足端 sphere 也能给接触检测一个稳定的点。 <inertial>不是装饰项。这里的质量和惯量来自 CAD,1.506 + 4×(0.18 + 0.186 + 0.05) ≈ 3.17 kg,和实物量级能对上。以后如果改了腿长、换了 mesh,却忘了同步改惯量,仿真出来的动作就会明显不对劲。- 12 个关节的
axis都写成0 0 1,不是因为它们真的都绕世界 Z 轴转,而是靠各级 body 的quat把局部坐标系提前转好了。看着某个关节方向不对时,先回头查这段 body 以及祖先 body 的quat,不要只盯着axis。
所以读一条腿时,顺序很朴素:先看 body 嵌套,知道谁连着谁;再看 pos / quat,知道这段东西挂在哪里、坐标系有没有转过;然后看 joint,知道它怎么动;最后再管 geom 和 inertial。四条腿是完全对称的,看懂前右这一条就够了,剩下三条只是把根 body 的 pos 镜像到 (±x, ±y, 0),并把关节限位左右翻一下。
4.2.3 加载 mesh
mesh(网格)就是用一堆三角面片拼出来的 3D 外壳,常见文件格式是 .stl / .obj。Pupper 的机身、髋部、大腿、小腿这些精细外观,都不是靠 box / cylinder 手搓出来的,而是直接加载 CAD 导出的 STL。
但在 MJCF 里,STL 文件不能直接塞进 <worldbody>。它要走一条引用链:
STL 文件
└─ <compiler meshdir="..."> 告诉 MuJoCo 去哪个目录找
└─ <asset><mesh name="..." file="..."/> 给 STL 起一个模型内的名字
└─ <geom type="mesh" mesh="..."/> 把这个 mesh 真正挂到某个 body 上
所以看到 <geom type="mesh" mesh="BodyV4v70_001"/> 时,要反着查:它不是在找 BodyV4v70_001 这个文件,而是在找 <asset> 里叫 BodyV4v70_001 的 mesh;再由那个 <mesh> 去指向真正的 BodyV4v70_001.stl。
fixed.xml 里相关配置大概是这样:
<compiler angle="radian" meshdir="meshes/stl/" autolimits="true"/>
<asset>
<texture type="skybox" builtin="gradient" .../>
<texture name="grid" type="2d" builtin="checker" .../>
<material name="grid" texture="grid" .../>
<mesh name="BodyV4v70_001" file="BodyV4v70_001.stl"/>
<mesh name="LegAssemblyForFlangedv26_001" file="LegAssemblyForFlangedv26_001.stl"/>
<!-- 有些左右/前后对称零件会用 scale 做镜像或翻转 -->
<mesh name="LegAssemblyForFlangedv26_010" file="LegAssemblyForFlangedv26_010.stl"
scale="1 -1 1"/>
<!-- ... 共 13 块 mesh ... -->
</asset>
然后在 <worldbody> 里引用它:
<body name="base_link" pos="0 0 0.13">
<geom type="box" class="collision" .../>
<geom type="mesh" mesh="BodyV4v70_001"
group="1" contype="0" conaffinity="0" density="0"/>
</body>
这里有一个很重要的习惯:mesh 通常只负责好看,不负责碰撞。Pupper 里机身会同时挂两个 geom:一个简化的 box 做碰撞,一个精细的 mesh 做渲染。腿上也是类似,碰撞用 cylinder / sphere,视觉用 STL。原因很现实:STL 三角面太多,拿它做接触检测又慢又容易抖;简化几何体虽然不精细,但稳定很多。
几个参数顺手拆一下:
meshdir="meshes/stl/":STL 文件搜索目录。这个路径是相对 XML 文件解析的,所以从别的工作目录启动 viewer,一般也不会找错。name="BodyV4v70_001":模型内部用的名字,后面的<geom mesh="...">引用它。file="BodyV4v70_001.stl":真正的 STL 文件名,位于meshdir指定的目录下。scale="1 -1 1":按(x, y, z)三个方向缩放。某一维写-1就是沿那一维镜像,左右腿这种对称结构经常这么处理。group="1":viewer 里的显示分组。这里约定视觉 mesh 放在 group 1,简化碰撞体放在 group 3,调试时可以在 viewer 里分组开关。contype="0" conaffinity="0":关闭碰撞。两个值都为 0 的 mesh 只显示,不和地面、腿、机身发生接触。density="0":不要让这个视觉 mesh 再额外贡献质量。质量已经写在<inertial>里了,如果 mesh 又按密度算一遍,整机质量就会被重复算。
所以这小节最容易犯的错,不是 XML 语法,而是把"视觉模型"和"物理模型"混在一起。视觉上看见的是 STL,物理上参与碰撞和质量计算的,主要是 class="collision" 的简化 geom 加上 <inertial>。以后模型看起来没问题但一碰地就抖,优先查碰撞 geom;模型直接看不见,才去查 meshdir / <asset><mesh> / <geom mesh="..."> 这条引用链。
4.2.4 设置默认值
<default> 可以先理解成"模板"。MJCF 里很多元素会重复出现:12 个 joint、很多个 geom、12 个 actuator。如果每个地方都手写一遍 damping、forcerange、碰撞参数,文件会又长又容易漏。<default> 就是把这些共性先写好,后面的元素没单独覆盖时,就自动继承这一份。
fixed.xml 里这段默认值主要管四类东西:
<default>
<general forcerange="-3 3" forcelimited="true"
biastype="affine"
gainprm="5.0 0 0"
biasprm="0 -5.0 -0.1"/>
<!-- 默认 geom 不参与碰撞: 视觉网格走这条 -->
<geom condim="6" contype="0" conaffinity="0"/>
<!-- collision class: 显式写 class="collision" 才打开碰撞 -->
<default class="collision">
<geom group="3" contype="0" conaffinity="1"
solimp="0.015 1 0.015"
friction="0.8 0.02 0.01"/>
</default>
<!-- 关节默认: 带限位的 hinge + armature + 阻尼 + 摩擦损失 -->
<joint armature="0.0016" type="hinge"
damping="0.01" frictionloss="0.01"
limited="true"/>
</default>
<option cone="elliptic" impratio="100"/>
可以按这个继承关系读:
<default>
<general .../> -> 后面 12 个 actuator/general 都继承
<geom contype="0" .../> -> 普通 geom 默认不碰撞,视觉 mesh 走这条
<default class="collision"> -> 只有 class="collision" 的 geom 走这条
<joint .../> -> 后面 12 个 hinge joint 都继承
</default>
这里最反直觉的是 geom。它默认写成 contype="0" conaffinity="0",意思是普通 geom 先不参与碰撞。所以视觉 mesh 什么都不用额外写,天然只显示不碰撞。真正要碰撞的 box / cylinder / sphere 会显式写 class="collision",于是改走里面那份 group="3" contype="0" conaffinity="1"。这和上一节的思路对上了:视觉归视觉,碰撞归碰撞。
几个参数也别硬背,按作用分就行:
general forcerange="-3 3":位置伺服输出的力矩最多到±3 N·m。控制器算出来再大,也会被夹住。gainprm/biasprm:给<general>actuator 用,下一节会展开成 PD 公式。joint type="hinge":后面没写type的 joint 都是单轴转动关节。limited="true":关节限位生效,具体上下限来自每个<joint range="...">。armature="0.0016":给关节加一点等效转子惯量。没有它,理想关节太"轻",PD 一拉容易抖。damping="0.01"/frictionloss="0.01":一点阻尼和库仑摩擦,作用是把纯理想关节变得更像真实电机和传动。friction="0.8 0.02 0.01":碰撞摩擦参数,三个数大致对应滑动、滚动/横向、自旋摩擦。这里主要影响脚和地面接触时滑不滑。solimp="0.015 1 0.015":接触求解参数。可以先粗略理解成"接触别硬到一碰就炸",后面真正调地面接触时再细看。<option cone="elliptic" impratio="100"/>:这不属于 default,而是全局求解器选项。腿足机器人接触多,打开椭圆摩擦锥、提高impratio,接触通常会稳一些。
一句话概括:<default> 不是在创建新零件,它只是给后面那些 joint / geom / actuator 提前写好默认参数。
4.2.5 装位置伺服
<joint> 只说明"这个 body 能绕哪个轴动",不等于它有电机。没有 <actuator> 的话,关节就是被动铰链,data.ctrl 的长度也会是 0,Python 里写控制量根本没地方写。
fixed.xml 里给 12 个关节各接了一个 <general> actuator:
<actuator>
<general joint="leg_front_r_1" name="leg_front_r_1"/>
<general joint="leg_front_r_2" name="leg_front_r_2"/>
<general joint="leg_front_r_3" name="leg_front_r_3"/>
<general joint="leg_front_l_1" name="leg_front_l_1"/>
<!-- ... 共 12 个, 顺序: front_r / front_l / back_r / back_l -->
</actuator>
注意这 12 行本身很短,因为真正的参数都继承自上一节的 <default><general>。也就是说:
<actuator><general joint="leg_front_r_1" .../>
只负责说明:这一路电机接到哪个 joint 上
<default><general gainprm="..." biasprm="..." .../>
负责说明:这一路电机按什么公式出力、力矩上限是多少
<general> 比 <position> / <motor> 更底层一点,但这里用它实现的就是位置伺服。MuJoCo 会按下面这个结构算力矩:
force = gain * ctrl + bias(qpos, qvel)
biastype="affine" 表示 bias 是 qpos 和 qvel 的线性函数。把这里的参数代进去:
gainprm="5.0 0 0"
biasprm="0 -5.0 -0.1"
就得到:
这里的 u 就是 data.ctrl[i],也就是你写进去的目标关节角;q 是当前关节角;\dot q 是当前关节速度。所以这一路 actuator 的意思很直白:
data.ctrl[i] = target_angle # 目标关节角,单位 rad
然后 MuJoCo 内部自动算:
关节还没到目标角 -> Kp 给它推过去
关节速度太快 -> Kd 给它刹一下
力矩超过 ±3 -> forcerange 把它截断
这里不要再在 Python 里手写一遍 tau = Kp*(target-q) - Kd*qvel,否则就变成"外面算 PD,里面又算一次 PD",调参会很乱。§4.6 改的就是 gainprm / biasprm,等价于改这个内置 PD 的 Kp / Kd。
还有一个小细节:ctrl 的顺序跟 <actuator> 里的顺序一致,不是自动按名字排序。这里是:
front_r_1, front_r_2, front_r_3,
front_l_1, front_l_2, front_l_3,
back_r_1, back_r_2, back_r_3,
back_l_1, back_l_2, back_l_3
后面写站立、步态、RL action 时,12 维数组都要按这个顺序对齐。
4.2.6 录初始姿态
<keyframe> 是一组"存档姿态"。它不会让机器人自己动,也不是动画轨迹;它只是把某一刻的 qpos、ctrl 等状态记下来,方便脚本一键恢复。
<keyframe>
<key name="home" qpos="0 0 0 0 0 0 0 0 0 0 0 0"
ctrl="0 0 0 0 0 0 0 0 0 0 0 0"/>
</keyframe>
fixed 模型没有 floating base,所以 qpos 只有 12 维,正好对应 12 个关节角。这里全部写 0,意思是每个 hinge 都放在自己的零位。这个零位不一定等于你脑子里想象的"所有腿笔直向下",因为 body 的 quat 和 STL 的装配方向已经提前定好了;但它是这份模型约定的 home 参考姿态。
ctrl 也写 0,意思是位置伺服的目标角也是 0。这样脚本调用:
home_id = mujoco.mj_name2id(model, mujoco.mjtObj.mjOBJ_KEY, "home")
mujoco.mj_resetDataKeyframe(model, data, home_id)
mujoco.mj_forward(model, data)
之后,qpos 和 ctrl 是一致的,伺服不会一上来就产生一大股纠偏力矩。mj_forward 只负责把当前状态下的 body 位姿、site 位姿、传感器前向量算出来;它不推进时间。
floating 模型的 keyframe 会长一些:qpos 前 7 维是 base 位姿 (x, y, z, qw, qx, qy, qz),后面才是 12 个关节角。注意这里又会遇到四元数:base 姿态也是 (qw, qx, qy, qz),不是欧拉角。
<keyframe> 可以有很多个。比如后面调站立时,可以加一个 <key name="crouch" qpos="..."/>,脚本里按名字切过去:
crouch_id = mujoco.mj_name2id(model, mujoco.mjtObj.mjOBJ_KEY, "crouch")
mujoco.mj_resetDataKeyframe(model, data, crouch_id)
调模型时这很省事,比每次在 Python 里手写一长串初始角要稳。
4.2.7 读 IMU
传感器要先有一个"挂点"。fixed.xml 在机身上放了一个 site:
<site name="body_imu_site" pos="0.09 0 0.032"/>
site 没质量,也不碰撞。它就是一个标记点:告诉 MuJoCo,IMU 大概装在机身的哪个位置、朝向跟哪个 body 走。后面的 <sensor> 块就引用这个 site:
<sensor>
<framequat name="body_quat" objtype="site" objname="body_imu_site"/>
<gyro name="body_gyro" site="body_imu_site"/>
<accelerometer name="body_acc" site="body_imu_site"/>
<framequat objtype="site" objname="body_imu_site" name="orientation"/>
<framepos objtype="site" objname="body_imu_site" name="global_position"/>
<framelinvel objtype="site" objname="body_imu_site" name="global_linvel"/>
<frameangvel objtype="site" objname="body_imu_site" name="global_angvel"/>
</sensor>
这里有两类读数,别混在一起:
body_quat/orientation:site 在世界坐标系里的朝向,都是四元数,4 维。这里两个名字读到的是同一个 site 的姿态,只是保留了两个别名,方便后面代码统一接口。body_gyro:site 的角速度,3 维,比较像真实 IMU 里的陀螺仪。body_acc:site 的加速度,3 维,比较像真实 IMU 里的加速度计。global_position/global_linvel/global_angvel:仿真器直接给的全局真值。真实机器人上通常拿不到这么干净的全局位置和速度,但调试控制器时很好用。
Python 里可以直接按名字读:
quat = data.sensor("body_quat").data # shape: (4,)
gyro = data.sensor("body_gyro").data # shape: (3,)
vel = data.sensor("global_linvel").data # shape: (3,)
这里没有配置 noise,所以这些传感器读数是理想值,不是带噪声的实物 IMU。以后如果要做更接近真机的 sim2real,再给 sensor 加噪声、bias、延迟也不迟。本章先用干净读数,把模型和控制链路跑通。
到这里,worldbody 负责骨架和几何,外面的 <compiler> / <asset> / <default> / <actuator> / <keyframe> / <sensor> 负责资源、默认参数、电机、初始姿态和读数。fixed.xml 的主体就拼齐了。
4.3 在 viewer 中查看模型
4.3.1 安装环境
参考codes/practices/quadruped/cs123/README.md 用 uv 安装环境:
# 进入 CS123 课程目录
cd codes/practices/quadruped/cs123
# uv 会按 .python-version 准备 Python 3.12,创建 .venv 并安装 pyproject.toml 锁定的依赖
uv sync
之后用 uv run 执行脚本,无需手动激活环境。注意:MuJoCo 3.x 在 macOS 上跑交互式 viewer 必须用 mjpython(uv run mjpython xxx.py),Linux / Windows 用 python 即可。
4.3.2 启动 viewer
fixed.xml 已经搭好,用 Python 加载它并打开 viewer,核心流程就三步:加载模型、应用 home keyframe、开渲染循环。配套代码里的 view_pupper_v3_fixed.py 也是这三步,只是外面多包了一层路径处理、相机设置和报错提示。
先看最小流程,知道 MuJoCo API 在干什么;再回头看完整脚本,就不会觉得它突然多出一堆函数。
加载模型 + 应用 home keyframe:
# 导入 MuJoCo Python API
import mujoco
# 从 MJCF 文件编译出静态模型 MjModel
# 这里的路径是相对当前运行目录的:codes/practices/quadruped/cs123/4.quadruped-mjcf
model = mujoco.MjModel.from_xml_path("models/pupper_v3_fixed.xml")
# 为这个模型创建一份运行时状态 MjData
data = mujoco.MjData(model)
# 找到 <key name="home"> 在模型里的内部 id
home_id = mujoco.mj_name2id(model, mujoco.mjtObj.mjOBJ_KEY, "home")
# 把 data.qpos / data.ctrl 等状态一次性重置到 home keyframe
mujoco.mj_resetDataKeyframe(model, data, home_id)
# 根据当前 qpos 计算所有 body / geom / site 的世界位姿
# 注意:这里只做正运动学刷新,不推进物理时间
mujoco.mj_forward(model, data)
from_xml_path 把 fixed.xml 编译成静态 MjModel;MjData 给它配一份运行时状态。mj_name2id 拿 §4.2.6 那个 <key name="home"> 的内部 id,mj_resetDataKeyframe 把 qpos / ctrl 都设成 keyframe 里的值;最后一次 mj_forward 让正运动学算出每个 body 的世界位姿——viewer 渲染就有数据了。这一步不调 mj_step,机器人只是被摆到 home pose、不演化动力学。
完整脚本里这一段被包进 _load_model(path),写法稍微稳一点:
_DIR = pathlib.Path(__file__).parent
MODEL_PATH = _DIR / "models" / "pupper_v3_fixed.xml"
def _load_model(path: pathlib.Path) -> tuple[mujoco.MjModel, mujoco.MjData]:
# 先把路径展开成绝对路径,避免从别的目录运行时找不到 XML
model_path = path.expanduser().resolve()
# 编译 MJCF,并创建运行时 data
model = mujoco.MjModel.from_xml_path(str(model_path))
data = mujoco.MjData(model)
# 优先使用 <key name="home">;如果 XML 里没有这个 key,就退回默认 reset
home_id = mujoco.mj_name2id(model, mujoco.mjtObj.mjOBJ_KEY, "home")
if home_id >= 0:
mujoco.mj_resetDataKeyframe(model, data, home_id)
else:
mujoco.mj_resetData(model, data)
# 刷新一次正运动学,让 viewer 打开时立刻有正确位姿
mujoco.mj_forward(model, data)
return model, data
这一版和上面的最小代码做的是同一件事,只是多了两个工程细节:MODEL_PATH 相对脚本文件本身,不依赖你在哪个目录启动;home_id >= 0 兜底,避免以后改 XML 时删掉 home keyframe 就直接崩掉。
打开 viewer 进渲染循环:
# time 用来控制刷新频率,避免循环跑满 CPU
import time
# viewer 模块负责打开 MuJoCo 的交互式窗口
import mujoco.viewer
# launch_passive 只打开 viewer,不自动推进仿真
# model / data 还是由当前脚本自己维护
with mujoco.viewer.launch_passive(model, data) as viewer:
# viewer 窗口没关闭时一直刷新
while viewer.is_running():
# 根据当前关节角重新计算机器人姿态
# 这里仍然不调用 mj_step,所以机器人不会自己动起来
mujoco.mj_forward(model, data)
# 把最新的 model/data 同步到 viewer 窗口
viewer.sync()
# 大约 60 Hz 刷新,足够流畅,也不会占满 CPU
time.sleep(1.0 / 60.0)
launch_passive 比 launch 灵活一档:物理推进留给脚本控制,viewer 只负责显示。这个循环每帧只调 mj_forward、不调 mj_step——机器人静止,但拖动 viewer 的关节滑块时姿态会立刻刷新到屏幕(关节角变 → 正运动学重算 → sync 推到 GUI)。等到 §4.5 让 Pupper "站起来"才把 mj_step 接上、真正推进物理。
完整脚本里还有一个 _configure_viewer(viewer):
def _configure_viewer(viewer: mujoco.viewer.Handle) -> None:
# 相机看向机身附近
viewer.cam.lookat[:] = [0.0, 0.0, 0.10]
# 视角距离和朝向;只影响打开窗口时看到的画面,不影响物理
viewer.cam.distance = 0.65
viewer.cam.azimuth = 135
viewer.cam.elevation = -22
这段只调相机,不改模型。删掉它模型照样能加载,只是 viewer 打开时视角可能没那么舒服。
完整脚本的 main() 大致就是把这些小块串起来:
def main() -> int:
model_path = MODEL_PATH.resolve()
model, data = _load_model(model_path)
# 打印模型规模,方便立刻确认 fixed 模型是不是 12 维
print(f"Loaded: {model_path}", flush=True)
print(f" nq={model.nq}, nv={model.nv}, nu={model.nu}, nbody={model.nbody}", flush=True)
print("Opening viewer. Close the window to exit.", flush=True)
try:
with mujoco.viewer.launch_passive(model, data) as viewer:
_configure_viewer(viewer)
while viewer.is_running():
# fixed viewer 只刷新正运动学,不推进动力学
mujoco.mj_forward(model, data)
viewer.sync()
time.sleep(1.0 / 60.0)
except RuntimeError as exc:
# macOS 上如果误用 python 而不是 mjpython,给一个更明确的提示
if sys.platform == "darwin" and "mjpython" in str(exc):
print("\nOn macOS, run the interactive viewer with mjpython:", file=sys.stderr)
print(f" mjpython {pathlib.Path(__file__)}", file=sys.stderr)
return 2
raise
return 0
所以这节页面里的代码不是另一份实现,而是把 view_pupper_v3_fixed.py 拆开讲:先解释最小 API,再解释完整脚本为什么要多写这些包装。
跑起来:
# 进入 Lab 4 的代码目录
cd codes/practices/quadruped/cs123/4.quadruped-mjcf
# macOS 上打开交互式 viewer 要用 mjpython
mjpython view_pupper_v3_fixed.py # macOS
# Linux / Windows 通常直接用 python 即可
# 或 python view_pupper_v3_fixed.py # Linux / Windows
正常情况下会先在终端打印一行模型规模,然后弹出 viewer 窗口:
Loaded: .../models/pupper_v3_fixed.xml
nq=12, nv=12, nu=12, nbody=14
Opening viewer. Close the window to exit.
nq=nv=nu=12 直接对应"12 个关节角 / 12 个角速度 / 12 路控制"——fixed 模型没有 freejoint,所以这三个数恰好相等;nbody=14 是 1 个 worldbody + 1 个 base_link + 12 段腿(4 条 × 3 段)。
viewer 窗口如图 2 所示:
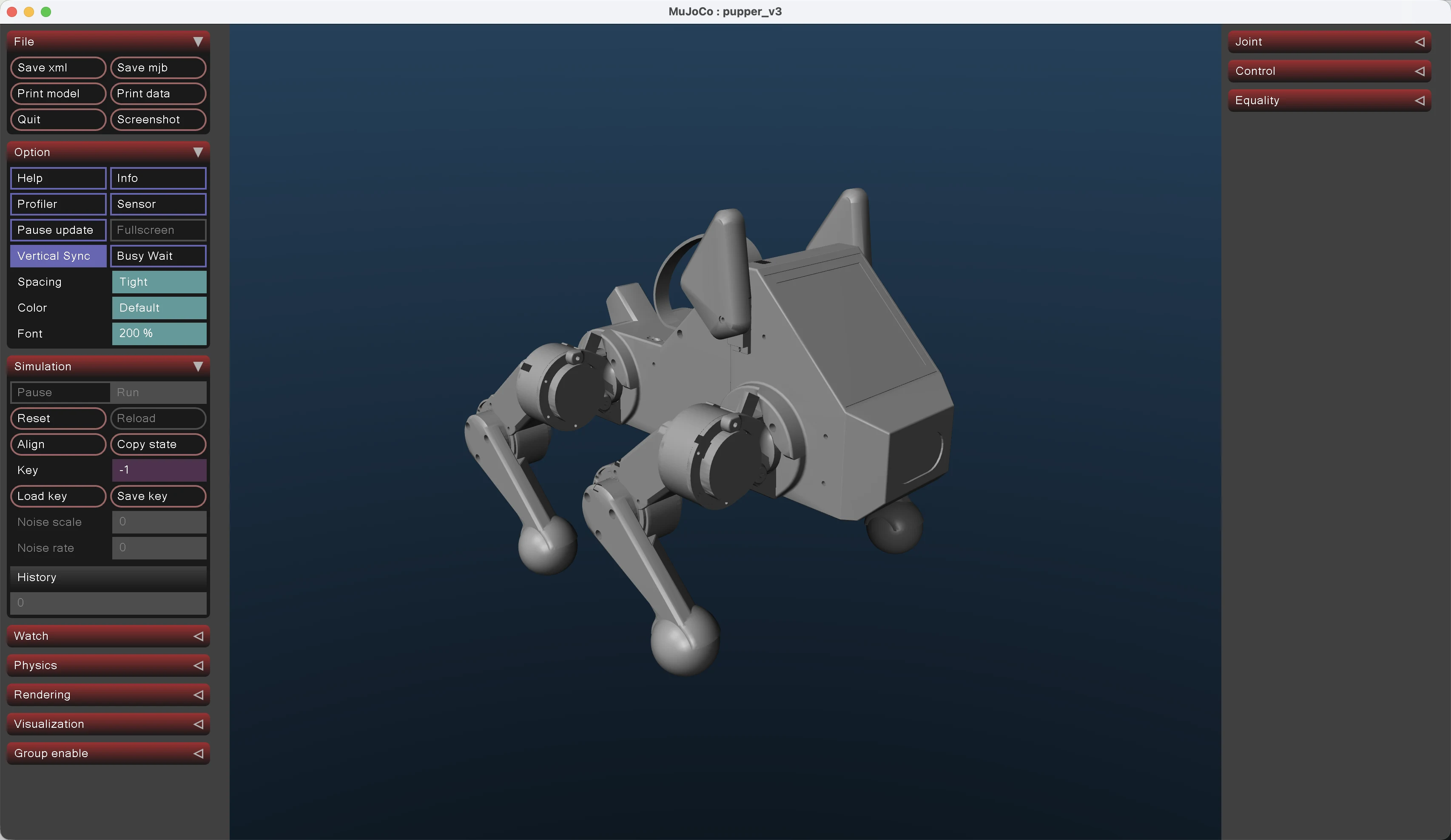
4.4 加 freejoint 改 floating
fixed 模型已经能把结构看清楚了,下一步才把机身放开,让它真的受重力影响。这个版本叫 floating,因为 base_link 不再焊在世界坐标里,而是通过一个 <freejoint/> 变成 6 DoF 自由刚体。
仓库里已经放了一份改好的 pupper_v3_floating.xml,可以直接对照。为了方便动手,pupper_v3_fixed.xml 里也预留了 Lab 4.4 的注释开关:想临时把 fixed 改成 floating,只需要改两处。
第一处,在 base_link 的 <inertial> 后面打开这行:
<body name="base_link" pos="0 0 0.13" gravcomp="0">
<inertial .../>
<!-- Lab 4.4 实验:打开下面这一行,base_link 就从 fixed 变成 floating。
记得同时把 keyframe 里的 home qpos 切到 floating 版本。
<freejoint name="world_to_body" />
-->
<geom .../>
</body>
也就是把注释里的这一行挪出来:
<freejoint name="world_to_body" />
第二处,切换 home keyframe。fixed 版的 qpos 只有 12 个关节角;一旦加了 <freejoint/>,qpos 前面会多出 7 维 base 位姿,所以原来的 12 维 home 就不够长了。
pupper_v3_fixed.xml 里已经把 floating 版 home 放在注释里了。做实验时,把上面的 fixed home 注释掉,再打开下面这条 floating home:
<key name="home"
qpos="0 0 0.28 1 0 0 0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0"
ctrl="0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0"/>
这串 qpos 看起来长,其实分成三段就清楚了:
0 0 0.28 -> base 的世界位置 (x, y, z),先把机身放到 0.28 m 高
1 0 0 0 -> base 的姿态四元数,单位姿态,不旋转
后面 12 个 0 -> 四条腿的 12 个关节角
ctrl 仍然是 12 维,因为 actuator 还是只驱动 12 个腿部关节。freejoint 是被动的,没有电机,所以不会出现在 ctrl 里。
配套代码里给了一份 view_pupper_v3_floating.py:主循环用 mj_step 推进物理(不是 §4.3 那个 fixed 脚本里的 mj_forward),所以会演化重力和接触,能看到机身从 z=0.28 m 落下、四脚触地、再被位置伺服把关节拉回目标角的全过程——这就是 §4.5"站住"的物理基础。
cd codes/practices/quadruped/cs123/4.quadruped-mjcf
mjpython view_pupper_v3_floating.py # macOS
# 或 python view_pupper_v3_floating.py # Linux / Windows
要练自己动手切 freejoint,把脚本里的 MODEL_PATH 改成 pupper_v3_fixed.xml,再按本节开头那两处把 fixed.xml 改成 floating(打开 <freejoint/> 那行 + 切到 floating 版 home keyframe),跑同一条命令即可。
macOS 上不要走
mjpython -m mujoco.viewer --mjcf=...:mjpython 启动时为了拿 GUI 主线程已经 import 过一次mujoco.viewer,再用-m通过 runpy 跑第二次会撞出RuntimeError: Caught an unknown exception!(错在_Simulate(...),与 XML 内容无关)。脚本入口mjpython script.py绕开这个问题。Linux / Windows 不依赖mjpython,python -m mujoco.viewer --mjcf=models/pupper_v3_floating.xml仍然可用。
为什么先 fixed 后 floating:fixed 模型把"6 自由度浮动"这个变量摁住,剩下的不稳全归到关节 PD 或惯量参数上,调试可观测。fixed 站得住、关节范围对,再换 floating 看接触和重力——出问题更容易二分到具体环节。这是腿足建模时的通用工程顺序。
下面给一张"哪儿写错都会让 Pupper 站不住"的速查表,按调试顺序排(floating 模型才会出现这些症状,fixed 模型只会卡在第一行):
| 症状 | 多半是哪里写错 | 怎么自检 |
|---|---|---|
| 启动就坐地、膝盖支不住 | forcerange="-3 3" 把伺服 ±3 N·m 截了;或 gainprm 第 1 项 Kp 太小 | 把 fixed 模型也跑一遍:fixed 都撑不住关节角,就是力矩不够 |
| 站住了但高频抖动 | armature="0.0016" 被改没了,或 biasprm 第 3 项 Kd 太小 | 把 dt 调到 0.5 ms,抖动消失 → 接触/数值;不消失 → PD |
| 站住但慢慢往一侧倒 | 某个 body 的 <inertial pos> 不对,或 mass 比例失衡 | 在 viewer 里勾出 body inertial 可视化,逐段对照 CAD |
| 一施力就滑、走不动 | 足端 sphere 的 friction 太低 | 把 class="collision" 默认 friction 第一维从 0.8 调到 1.5 |
| 仿真直接 NaN | <inertial> 缺失或惯量负值 / 关节 limits 互斥 | 跑 mujoco.mj_printData,看哪个 body 的 M 矩阵里有 inf |
4.5 让 Pupper 站起来
§4.4 把 freejoint 加上之后,机器人会从 0.28 m 落下。要让它"站住"——也就是落地后维持目标关节角——只需要做两件事:
- 应用 home keyframe:
mj_resetDataKeyframe一次,把qpos设到带 base 高度的 19 维状态、ctrl设到 12 个初始目标角。 - 每步循环 step:因为 §4.2.5 的
<general>已经把 PD 内嵌进 actuator,不需要在 Python 里再写 PD——ctrl给到目标关节角,伺服自己把 12 个关节拉过去,足端球落地后摩擦撑住机身。
§4.4 的 view_pupper_v3_floating.py 已经把这两件事都跑通了——Pupper 落地后会被 PD 拉到 home keyframe 的 12 个目标角(全 0),稳稳站在地上,base z 稳在 0.18 m 附近。看起来反直觉的是:12 个关节角都是 0,怎么不是"四脚直伸贴地"?这要回到 §4.2.2 那条 quat 规则——Pupper 的 mesh 和各级 body 的 quat 都是按"关节角 0 = 膝盖屈、机身托起"装配的,全 0 ctrl 落在屈膝站姿上,是仓库里写死的"home 即站姿"约定。
那 §4.5 在 §4.4 基础上还要做什么?两件事:每帧显式把伺服目标写一遍 data.ctrl(保持目标不被任何外部代码意外改写——§5 真正写步态时就会在循环里改它)、记录 data.qpos[2] 时间序列作为站住的客观判据。配套代码 stand_pupper_v3_floating.py,相对 floating 脚本真正不同的就这几行:
import numpy as np
# Pupper 的 mesh + body quat 已经按"关节角 0 = 屈膝站姿"装配, 这里直接复刻 home pose;
# 想换姿态把这 12 个数改掉就行——actuator 顺序是 front_r 1/2/3, front_l 1/2/3,
# back_r 1/2/3, back_l 1/2/3, 左腿 HFE/KFE 限位与右腿镜像 (§4.2.1 表)。
STAND_POSE = np.zeros(12)
heights = []
with mujoco.viewer.launch_passive(model, data) as viewer:
while viewer.is_running():
data.ctrl[:] = STAND_POSE # 每帧覆盖伺服目标
mujoco.mj_step(model, data)
heights.append(data.qpos[2]) # 记录 base z, 下一节判稳定性用
viewer.sync()
time.sleep(model.opt.timestep)
跑:
cd codes/practices/quadruped/cs123/4.quadruped-mjcf
mjpython stand_pupper_v3_floating.py # macOS
# 或 python stand_pupper_v3_floating.py # Linux / Windows
容易栽跟头的索引细节(floating 模型独有,fixed 模型没有这层麻烦):
qpos长 19、qvel长 18——四元数 4 维但角速度只有 3 维。关节角是qpos[7:],关节角速度是qvel[6:],写错会读成 base 的位置 / 速度,PD 立刻抖飞。ctrl的长度 =<actuator>的个数 = 12,不包括 base。data.ctrl[:] = STAND_POSE就是写 12 个目标关节角。<freejoint>的 6 个 base DoF 没有 actuator——机器人不能自己飞,base 完全靠四条腿与地面的接触力间接受控。
怎样算"站住了"
肉眼看视频不够客观。判 pass 的标准是后期 base z 的稳定性,stand_pupper_v3_floating.py 在 viewer 关闭时会自动打印一行:
samples_per_second = int(round(1.0 / model.opt.timestep)) # dt=2 ms 时是 500
tail = np.array(heights[-samples_per_second:])
print(f'final z={tail[-1]:.3f} m, last-1s std={np.std(tail) * 1000:.2f} mm')
默认参数下读数大致是 final z ≈ 0.18 m, last-1s std < 1 mm——四条 PD 拉直的腿撑住机身,base 稳定在膝盖屈曲对应的高度。如果看到 std 远超 5 mm,多半就掉进 §4.4 速查表里的某种情况了;§4.6 就是用来调 gainprm / biasprm 把它压回 5 mm 以内的。
4.6 调 gainprm 与 biasprm
§4.2.5 推过:<general biastype="affine"> 的力矩公式是
实战模型默认:
<general forcerange="-3 3" forcelimited="true"
biastype="affine"
gainprm="5.0 0 0"
biasprm="0 -5.0 -0.1"/>
也就是 Kp = 5、Kd = 0.1。这里的 XML 片段只是告诉你参数从哪里来;实验时不用反复改 XML。更干净的做法是:每次加载模型后,在 Python 里直接改编译后的 model.actuator_gainprm / model.actuator_biasprm,跑完这一组就丢掉,下一个实验重新加载一份干净模型。
这样有两个好处:原始 MJCF 不会被改乱;四组参数可以一次跑完,结果也更容易横向比较。
四组典型对照:
| 实验 | gainprm | biasprm | 预期现象 |
|---|---|---|---|
soft | 1 0 0 | 0 -1 -0.05 | Kp = 1,关节伺服跟不上 home pose,腿被自重压塌;fixed 模型也撑不到目标角 |
default | 5 0 0 | 0 -5 -0.1 | 站住、足端微抖;这是仓库里写死的值 |
stiff | 30 0 0 | 0 -30 -0.1 | Kp = 30,刚度提高 6 倍——位置跟得紧,但 dt = 2 ms 上明显高频抖动 |
underD | 5 0 0 | 0 -5 0 | Kd = 0,纯 P 控制;落地时反复弹跳,base z 波动十几毫米 |
用脚本一次扫四组
仓库里已经放好了脚本:
codes/practices/quadruped/cs123/4.quadruped-mjcf/gain_sweep_quick.py
它每次都从同一份 pupper_v3_floating.xml 加载模型,然后在内存里改 actuator 参数,不会写回 XML 文件。先直接跑:
cd codes/practices/quadruped/cs123/4.quadruped-mjcf
python gain_sweep_quick.py
脚本默认会在第 2 秒给 base_link 一个很短的向下扰动。原因很简单:如果机器人只是自由落地然后静止站着,几组参数最后都可能看起来差不多;加一个可重复的下压扰动后,Kp 太小、Kd 不足、刚度偏高这些差异会在曲线和动图里直接露出来。
运行完会得到四类结果:
outputs/gain_sweep_summary.csv # 每组 Kp/Kd、gainprm/biasprm、final z、push dip
outputs/gain_sweep_base_z.png # 四条 base z 曲线放在同一张图里
outputs/gain_sweep_effects.png # 四组参数最后一帧的 2x2 对比图
outputs/gain_sweep_effects.gif # 四组参数同步播放的 2x2 动图
读结果时先看三个数:
final z:最后的机身高度。太低说明腿撑不起来,可能是Kp太小或力矩上限太低。last-1s std:最后 1 秒机身高度的标准差。越大说明越抖;本章先用< 5 mm当作稳定线。push_dip:第 2 秒被向下压以后,base 最多又下沉了多少毫米。这个数越大,说明这组参数抗扰动越弱。
终端里会打印一张表,格式大概是这样:
case Kp Kd final_z(m) last_1s_std(mm) push_dip(mm) gainprm biasprm
soft 1.00 0.05 0.085 0.01 12.97 1 0 0 0 -1 -0.05
default 5.00 0.10 0.120 0.00 6.79 5 0 0 0 -5 -0.1
stiff 30.00 0.10 0.126 0.00 1.97 30 0 0 0 -30 -0.1
underD 5.00 0.00 0.120 0.00 9.75 5 0 0 0 -5 -0
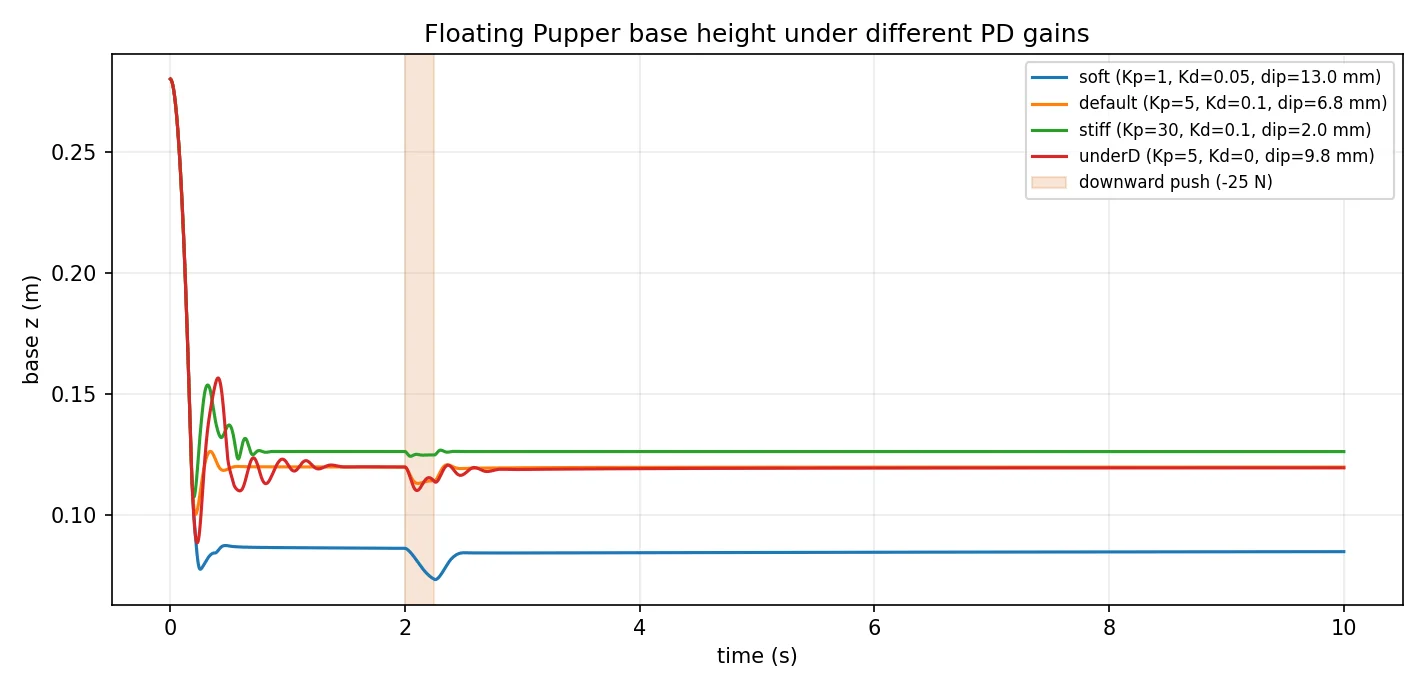
脚本生成的 gain_sweep_base_z.png:橙色竖带是第 2 秒的向下扰动。soft 本身站高最低,被压后下沉最大;stiff 下沉最少;underD 和 default 最终高度接近,但扰动后的下沉更明显。
这里不要只盯着最后一行数字。gain_sweep_base_z.png 会把第 2 秒下压扰动也标出来,你能看到 soft 的站高本来就低、扰动后又沉下去一截;stiff 下沉最少,但过高的 Kp 在更复杂动作里容易带来接触抖动;underD 的最终高度和 default 接近,但被压以后下沉更多,说明缺少阻尼时恢复过程更松。gain_sweep_effects.gif 则直接把四组仿真放在一起看,最容易把曲线和机器人姿态对应起来。
脚本生成的 gain_sweep_effects.gif:四组参数从同一初始高度下落、接触地面、被短暂下压,再恢复到各自的平衡高度。这个动图适合用来把上面的曲线和机器人姿态对应起来。
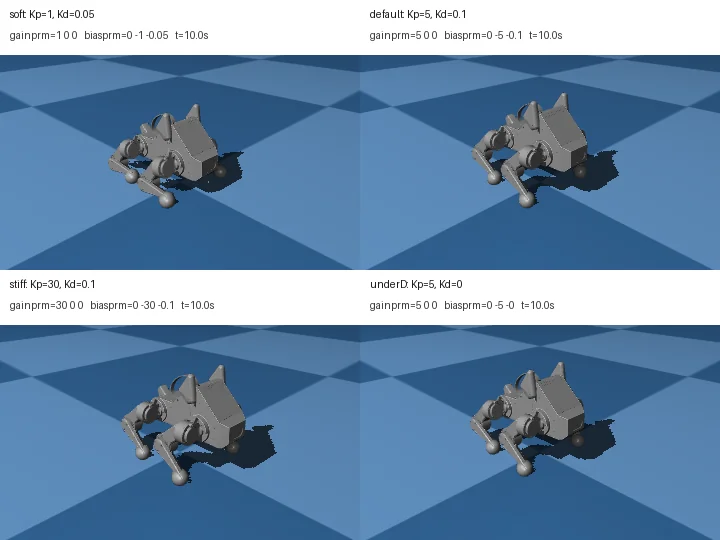
脚本生成的 gain_sweep_effects.png:同一时刻的 2×2 静帧对比。最终姿态里,soft 明显更矮,stiff 把机身撑得更高。
脚本里真正改参数的核心只有这几行:
model.actuator_gainprm[:, :] = 0.0
model.actuator_biasprm[:, :] = 0.0
model.actuator_gainprm[:, 0] = kp # gainprm = "Kp 0 0"
model.actuator_biasprm[:, 1] = -kp # biasprm 第 2 项 = -Kp
model.actuator_biasprm[:, 2] = -kd # biasprm 第 3 项 = -Kd
也就是说,你想加一组新实验,不需要改 XML,只要打开 gain_sweep_quick.py,在 CASES 里多放一个 GainCase("name", kp, kd, "..."),重新运行脚本即可。
如果你想单独看某一组的实时效果,用同一个脚本打开 viewer:
# macOS
mjpython gain_sweep_quick.py --viewer soft
mjpython gain_sweep_quick.py --viewer default
mjpython gain_sweep_quick.py --viewer stiff
mjpython gain_sweep_quick.py --viewer underD
# Linux / Windows
python gain_sweep_quick.py --viewer stiff
viewer 模式也会在第 2 秒施加同样的下压扰动。只想看不加扰动的自由落体站立过程,就加 --no-push:
python gain_sweep_quick.py --viewer default --no-push
如果你的机器没有可用的 MuJoCo offscreen renderer,批量脚本可能生成不了 PNG / GIF。这时先跑纯数值版:
python gain_sweep_quick.py --no-render
不要把 Kp 调到 100+:
forcerange="-3 3"会把伺服力矩夹掉,输出实际饱和——观感上跟 stiff 类似但原因不同。需要更大刚度时一并放宽forcerange,并把armature从 0.0016 提一点(比如 0.005),数值积分才稳得住。
§5 我们要在"站着"的基础上让它"走起来"——届时 gainprm / biasprm 的较优参数会随步态频率再做一次微调。
项目拆解
§4.5 和 §4.6 调的是一只已经搭好的 Pupper。这里往前推一步:直接看一条完整工程链路,怎样从同一份 skeleton.xml 派生出 original / long-leg / heavy 三只变体,再分别求站姿、扫描 PD 参数,并把结果画成可观察的图。
从哪个文件开始
这个 Lab 的代码在:
codes/practices/quadruped/cs123/exercises/lab_4_urdf_surgery/
先认清几个文件:
| 文件 | 作用 |
|---|---|
starter.py | 本节主脚本:完整实现 + 关键注释,直接从这里学习修改过程 |
make_artifacts.py | 生成教程中的观察图:heatmap、三联静帧、base z 曲线 |
shared/models/skeleton.xml | 三只变体共用的骨架,Lab 里不要复制整棵 body 树 |
tests.py | 可选数值检查:想深入时再看,不作为本节学习要求 |
阅读时建议把 starter.py 折叠到这几个函数:make_variant()、find_stand_pose()、_pd_step()、find_stable_pd_gains()。其余渲染、画图、pickle 保存代码先当成基础设施。
代码主线
整个 Lab 可以按这条流水线理解。注意:这里每一步都已经在 starter.py 里写好,学习重点是看懂"为什么要这么改"。
make_variant()
写出 original / long-leg / heavy 三份 MJCF
↓
find_stand_pose()
给每份模型求 12 维站姿关节角
↓
find_stable_pd_gains()
扫 Kp/Kd 网格,选 base z 最稳的一格
↓
make_artifacts.py
画出 heatmap、三只 Pupper 并排图、base z 曲线
改动 1:生成三份 MJCF
入口是:
def make_variant(name: str, *, leg_scale: float = 1.0, torso_mass_scale: float = 1.0) -> Path:
...
不要复制 skeleton.xml 里的整棵 body 树。正确做法是写一个很短的变体 XML,在 <include file="../../shared/models/skeleton.xml"/> 前面注入几组 default class。skeleton.xml 里的 thigh / calf / foot / torso 都已经预留了 variant_* class,等你从外面塞参数。
这一关主要改这些量:
variant_thigh/variant_calf的fromto:腿长变了,capsule 的长度要跟着变。variant_thigh/variant_calf的mass:这里按leg_scale近似线性缩放。variant_torso的mass:heavy 通过torso_mass_scale改身体质量。variant_foot的pos:小腿变长后,foot site 和 foot sphere 也要跟到新的小腿末端。variant_ballast:heavy 背上的深灰小盒只是视觉标记,不要把 torso 画成一个巨大白盒。
starter.py 里的实现可以读成"先算参数,再把参数注入 MJCF default":
thigh_len = THIGH_LEN * spec.leg_scale
calf_len = CALF_LEN * spec.leg_scale
thigh_mass = THIGH_MASS * spec.leg_scale
calf_mass = CALF_MASS * spec.leg_scale
torso_mass = TORSO_MASS * spec.torso_mass_scale
xml = f"""<mujoco model="{spec.key}">
<compiler angle="radian" meshdir="../../shared/models/meshes/" autolimits="true"/>
<default>
<!-- 腿长变化只写在 default 里;真正的 body 树仍由 skeleton.xml 提供。 -->
<default class="variant_thigh">
<geom type="capsule" fromto="0 0 0 0 0 -{_fmt(thigh_len)}"
size="0.013" mass="{_fmt(thigh_mass)}"/>
</default>
<default class="variant_calf">
<geom type="capsule" fromto="0 0 0 0 0 -{_fmt(calf_len)}"
size="0.011" mass="{_fmt(calf_mass)}"/>
</default>
<!-- foot 的 geom 和 site 必须一起移到新的 calf 末端,否则视觉腿长和接触点会错开。 -->
<default class="variant_foot">
<geom type="sphere" pos="0 0 -{_fmt(calf_len)}" size="{_fmt(FOOT_RADIUS)}"/>
<site pos="0 0 -{_fmt(calf_len)}" size="0.015"/>
</default>
</default>
<include file="../../shared/models/skeleton.xml"/>
</mujoco>
"""
写完 XML 后立刻执行 mujoco.MjModel.from_xml_path(str(path)),把"能否编译"作为第一道检查。MJCF 路径、class 名、fromto 数字有一个写错,都会在这里尽早暴露。
改动 2:腿变长后重新求站姿
入口是:
def find_stand_pose(model: mujoco.MjModel, leg_scale: float = 1.0) -> np.ndarray:
...
输出必须是 12 维:
FL_HAA, FL_HFE, FL_KFE,
FR_HAA, FR_HFE, FR_KFE,
RL_HAA, RL_HFE, RL_KFE,
RR_HAA, RR_HFE, RR_KFE
这里不需要上复杂优化器。把一条腿先看成二维链就够了:固定 HAA = 0,在一组 HFE / KFE 网格里搜索,让 foot 的高度接近目标站高,同时不要让 foot 在 x 方向偏太远。找到一条腿的 (0, HFE, KFE) 后,复制到四条腿上。
long-leg 的站姿不能直接复用 original。腿变长后,如果还用原来的 HFE/KFE,foot 会落在不合适的位置,base 高度也会变。
starter.py 里用的是一个很朴素的网格搜索:
thigh_len, calf_len = _foot_geometry_lengths(model)
target_z = -0.14 * max(1.0, min(float(leg_scale), 1.5))
hfe_grid = np.linspace(0.18, 1.20, 220)
kfe_grid = np.linspace(-2.30, -0.25, 260)
best_score = np.inf
best = (0.70, -1.40)
for hfe in hfe_grid:
for kfe in kfe_grid:
x, z = _leg_xz(float(hfe), float(kfe), thigh_len, calf_len)
# 第一项管足端高度,第二项避免 foot 在 x 方向偏得太远,
# 第三项只是轻微偏好一个自然弯腿姿态,防止选到奇怪折叠解。
score = (z - target_z) ** 2 + 0.25 * x**2 + 0.002 * (hfe - 0.70) ** 2
if score < best_score:
best_score = score
best = (float(hfe), float(kfe))
haa_hfe_kfe = np.array((0.0, best[0], best[1]), dtype=float)
stand_pose = np.tile(haa_hfe_kfe, len(LEG_ORDER))
这段代码故意没有引入优化库。Lab 的重点不是"求全局最优站姿",而是让你看到:MJCF 几何一改,控制前的初始姿态也必须跟着重算。
改动 3:扫描 PD 参数
入口是:
def find_stable_pd_gains(
model: mujoco.MjModel,
stand_pose: np.ndarray,
kp_grid: np.ndarray = KP_GRID,
kd_grid: np.ndarray = KD_GRID,
) -> tuple[float, float, np.ndarray]:
...
要扫的网格是:
KP_GRID = [10, 30, 60, 120]
KD_GRID = [0.5, 1, 2, 5]
每一格都跑 6 秒站立,控制律写成:
tau = Kp * (qd - q) + Kd * (0 - qdot)
这里要特别注意索引:floating 模型的 qpos 前 7 维是 base,qvel 前 6 维是 base。PD 只能作用在后面的 12 个关节上,不能把 base 的位置和速度拿去做关节 PD。
starter.py 把这件事拆成两层。第一层 _pd_step() 只负责"取 12 个关节、算 torque、写 ctrl":
qpos_ids, qvel_ids = _joint_qpos_qvel_ids(model, prefix)
q = data.qpos[qpos_ids]
qdot = data.qvel[qvel_ids]
# stand_pose 是 12 维关节目标,不包含 floating base。
tau = gains.kp * (stand_pose - q) + gains.kd * (0.0 - qdot)
data.ctrl[:] = 0.0
data.ctrl[: len(tau)] = np.clip(tau, -MAX_TORQUE, MAX_TORQUE)
第二层 find_stable_pd_gains() 扫 4x4 参数表:
for i, kd in enumerate(kd_grid):
for j, kp in enumerate(kp_grid):
trace = simulate_stand(
model,
stand_pose,
PDGains(kp=float(kp), kd=float(kd)),
seconds=6.0,
base_height=base_height,
disturbance=True,
)
z_std[i, j] = trace.last_second_z_std
这里用最后 1 秒 base z 的标准差做颜色值。只看最终高度不够,因为有些参数会让机器人"趴得很稳",但那不是站住;base z 的抖动更能说明这组 PD 参数是不是有抗扰动余量。
怎么运行
命令从 codes/practices/quadruped/cs123/exercises/ 目录运行:
cd codes/practices/quadruped/cs123/exercises
# 直接运行完整 starter:生成三只变体,求站姿,扫描 PD,并打印每只的最佳 Kp/Kd
uv run python lab_4_urdf_surgery/starter.py
# 生成下方三张观察图,图片会写到 lab_4_urdf_surgery/portfolio/
uv run python lab_4_urdf_surgery/make_artifacts.py
正常输出大致是:
original: Kp=120, Kd=1, z_std=0.03 mm
long-leg: Kp=120, Kd=1, z_std=0.03 mm
heavy: Kp=120, Kd=1, z_std=0.03 mm
这些数字不需要背。它们只是在告诉你:三只机器人虽然身体参数不同,但脚本已经分别走完"变体 MJCF -> 站姿 -> PD 扫描"这条链路。
运行后看什么
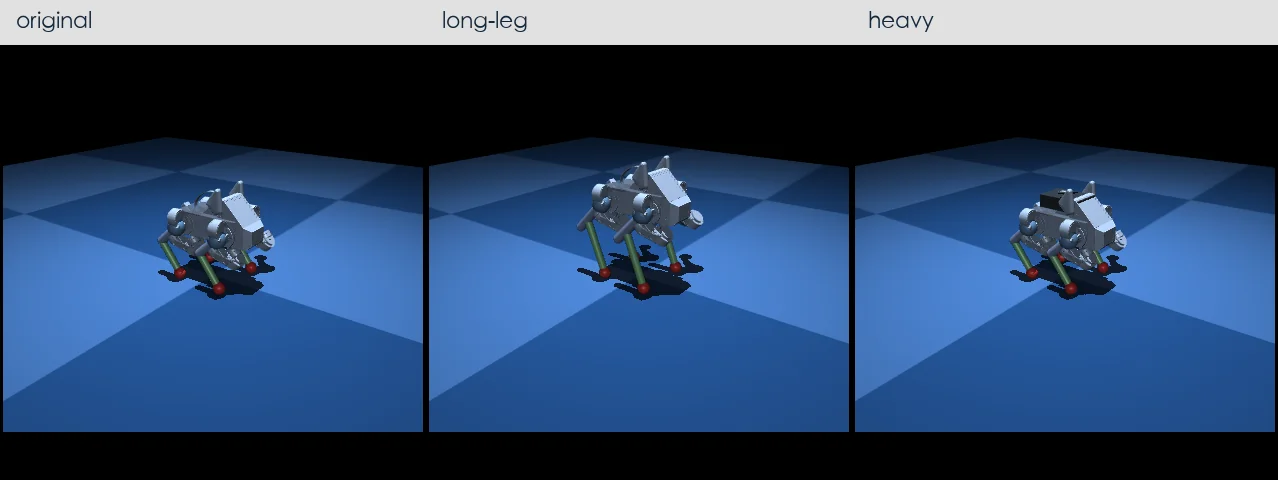
第一张图是三只 Pupper 的结构对比。左边是原版,中间是 long-leg,右边是 heavy。重点看两处:long-leg 的 thigh/calf 真的变长了;heavy 背上的深灰小盒只是视觉提示,真实质量变化写在 torso 的 mass 里。
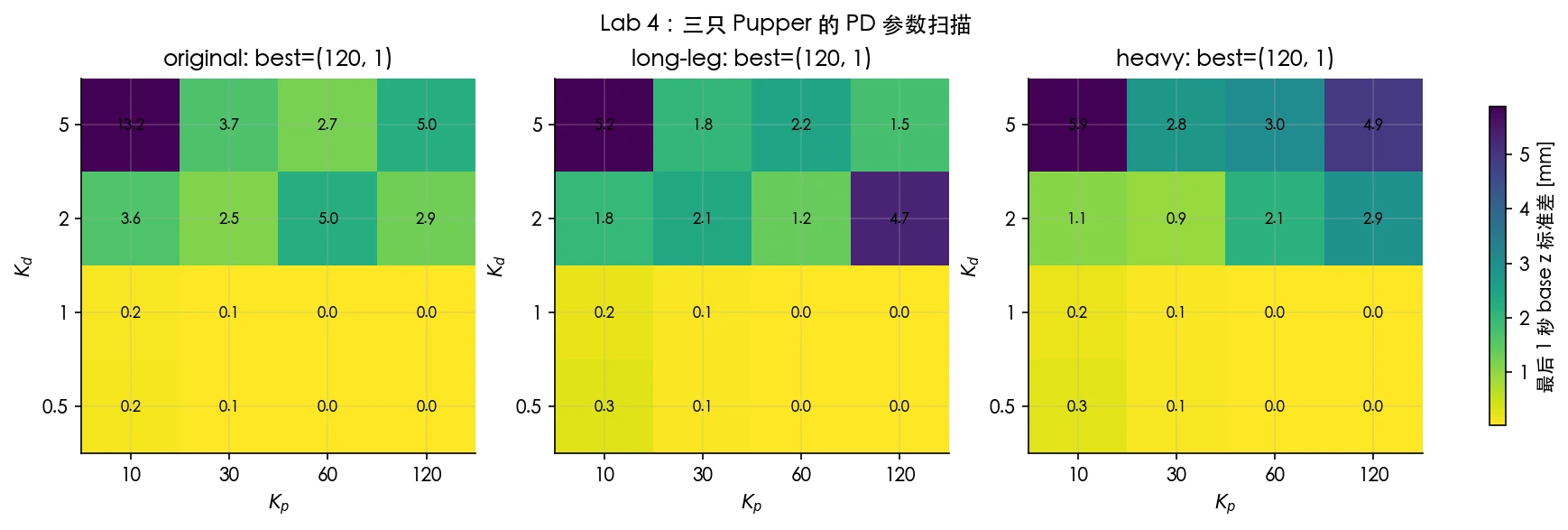
第二张图是 Kp/Kd heatmap。每个小格子代表一组 PD 参数,颜色表示最后 1 秒 base z 的抖动。颜色越浅,说明这组参数下机身高度越稳定。这里不是为了选一个"唯一正确答案",而是为了看到身体参数变化后,较优参数区域会跟着移动。
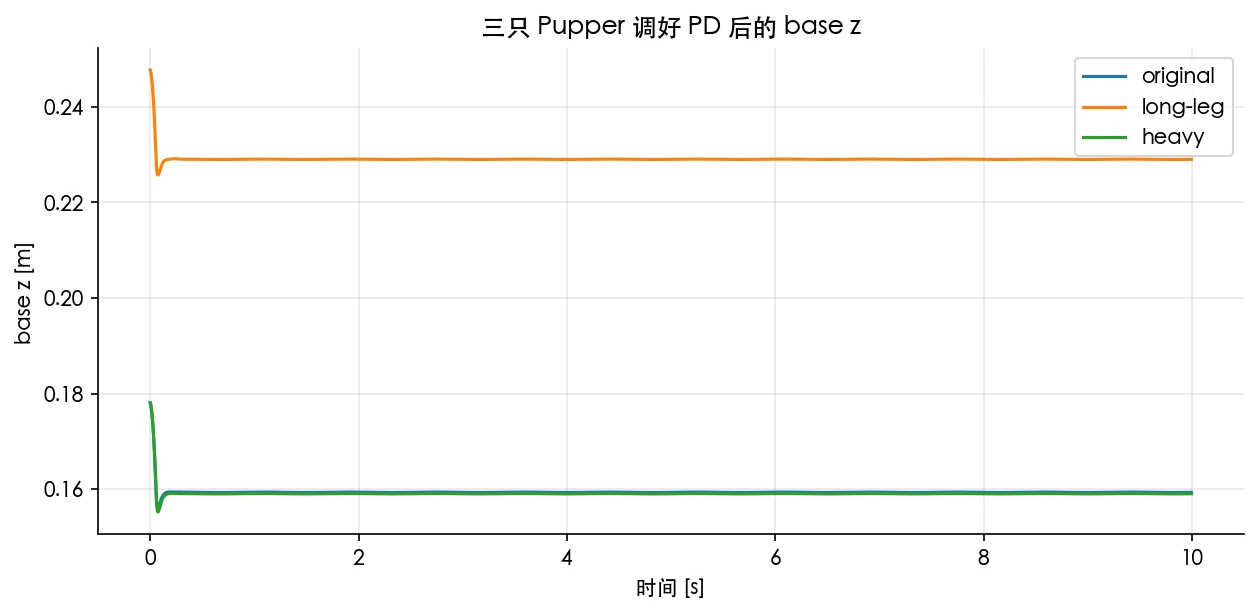
第三张图把三只 Pupper 在最佳 PD 下的 base z 画在一起。它回答的是另一个问题:不是"最后有没有站住",而是"站住之后有没有持续抖"。
如果你只想理解原理,看到这里就够了。想继续深入时,再去读 starter.py 的完整实现,或者改 VARIANTS、KP_GRID、KD_GRID、target_z 重新生成这些图。
完整脚本见 exercises/lab_4_urdf_surgery/。
参考资料
- CS123 Lab 4: Pupper Assembly
- mujoco_menagerie · MuJoCo 官方维护的标准模型库(含多款四足、机械臂、人形)
- MuJoCo 文档 · MJCF Reference
- MuJoCo 文档 · Modeling overview