🧪 龙虾大学:自动化科研实战(说句话,出论文)
适用场景:你有一个研究想法,想让 AI 帮你跑完从文献检索、实验设计、代码执行到论文撰写的全流程;或者导师/老板要求一份某领域的系统性调研,你希望自动化完成。你只需要在 Telegram 里描述课题,龙虾帮你搜文献、跑实验、写论文。
AutoResearchClaw 是由 aiming-lab 开发的开源自动化科研管线,目标是从一个研究想法到一篇可投稿论文的全自动产出。它内置 23 个阶段、8 大阶段组,覆盖选题分解、文献检索、假设生成、实验设计、代码生成与执行、结果分析、论文撰写、多智能体同行评审的完整科研流程。最终输出包括:
- 完整论文(Markdown + LaTeX,支持 NeurIPS / ICML / ICLR 模板)
- 实验代码与结果(自动生成 Python 代码并在沙箱中执行)
- 对比图表(含误差线和置信区间)
- 引用验证报告(4 层引用真实性校验)
- 同行评审意见(多智能体评审)
配合 OpenClaw 的 Telegram 渠道,你可以直接在手机上发起研究课题,然后去喝杯咖啡——论文写好了会推送到你的 Telegram。
1. 你将得到什么(真实场景价值)
跑通后,你会拥有一个全自动的科研助理:
场景 1:从想法到论文
- 问题:有一个研究想法,但从文献调研到实验再到写作,整个流程太长
- 解决:在 Telegram 里描述课题,AutoResearchClaw 自动完成文献检索、假设生成、实验设计与执行、论文撰写,产出一篇会议格式的完整论文
场景 2:应对紧急调研需求
- 问题:导师/老板要求一份某领域的系统性调研报告,从零开始来不及
- 解决:把需求发给龙虾,AutoResearchClaw 在后台跑管线,论文生成后自动推送到 Telegram
场景 3:带实验的研究论文
- 问题:不只想写综述,还需要跑实验验证假设,但手动写实验代码太耗时
- 解决:AutoResearchClaw 会自动设计实验、生成 Python 代码、在沙箱中执行(支持 GPU 加速),并将结果整合到论文中
场景 4:研究选题探索
- 问题:想了解某个交叉领域有哪些研究进展,但不知道从哪篇论文开始读
- 解决:描述你感兴趣的方向,AutoResearchClaw 会帮你从海量论文中筛选、整理,快速建立领域全景认知
2. 技能选型:为什么用 AutoResearchClaw?
核心架构:23 阶段 × 8 阶段组
flowchart LR
subgraph A["A 选题"]
A1["选题初始化"]
A2["问题分解"]
end
subgraph B["B 文献"]
B1["检索策略"]
B2["文献收集"]
B3["文献筛选 🚪"]
B4["知识提取"]
end
subgraph C["C 综合"]
C1["发现聚类"]
C2["假设生成"]
end
subgraph D["D 实验设计"]
D1["实验设计 🚪"]
D2["代码生成"]
D3["资源规划"]
end
subgraph E["E 执行"]
E1["沙箱执行"]
E2["自愈迭代"]
end
subgraph F["F 分析"]
F1["结果分析"]
F2["研究决策"]
end
subgraph G["G 写作"]
G1["论文大纲"]
G2["论文撰写"]
G3["同行评审"]
G4["论文修改"]
end
subgraph H["H 定稿"]
H1["质量关卡 🚪"]
H2["知识归档"]
H3["导出发布"]
H4["引用验证"]
end
A --> B --> C --> D --> E --> F --> G --> H🚪 标记的阶段为人工审批关卡(Gate Stage),默认需要人工确认才能继续。使用
--auto-approve可跳过。
实验执行模式
AutoResearchClaw 支持多种代码执行环境,自动检测硬件并选择最优方案:
| 模式 | 说明 | 适用场景 |
|---|---|---|
sandbox | 本地 Python + venv 隔离 | 轻量实验,无需容器 |
docker | 容器化执行,支持网络策略控制 | 需要环境隔离的实验 |
ssh_remote | 远程 GPU 服务器执行,可指定 GPU ID | 深度学习训练、大规模实验 |
simulated | 模拟执行,不实际运行代码 | 测试管线流程、纯综述论文 |
GPU 支持:自动检测 NVIDIA CUDA 和 Apple MPS,无 GPU 时回退到 CPU。如果你的课题涉及深度学习实验(如训练模型、跑 benchmark),建议使用带 GPU 的服务器并配置
ssh_remote或启用 Docker GPU 支持。
为什么选 AutoResearchClaw?
| 特性 | 说明 |
|---|---|
| 全流程自动化 | 23 个阶段覆盖完整科研流程,从选题到投稿 |
| 真实实验执行 | 自动生成代码、在沙箱中执行、自愈修复,支持 GPU 加速 |
| 学术级输出 | LaTeX 论文(NeurIPS/ICML/ICLR 模板)、BibTeX 引用、对比图表 |
| 引用真实性保障 | 4 层验证:arXiv ID → CrossRef DOI → Semantic Scholar 标题匹配 → LLM 相关性评分 |
| 多智能体评审 | 假设、实验结果、论文均经过多视角评审 |
| 自学习进化 | 每次运行提取经验教训,后续运行自动复用 |
| 开源免费 | 项目完全开源,只需自备 LLM API Key |
与论文推送助手的区别:论文推送助手侧重于每日论文筛选和摘要推送(输入是关键词,输出是论文列表);AutoResearchClaw 侧重于完整论文产出(输入是研究课题,输出是可投稿论文)。两者互补,可以搭配使用。
3. 配置指南:从零到论文的完整流程
3.1 前置条件
| 条件 | 说明 |
|---|---|
| OpenClaw 已安装运行 | 基础环境就绪 |
| Telegram 账号 | 用于与 OpenClaw 交互 |
| 大模型 API Key | 支持 OpenAI / Claude / DeepSeek / 本地模型等 |
| 工具配置档为 coding/full | 需要命令执行权限,详见第七章 |
| Python >= 3.10 | AutoResearchClaw 运行依赖 |
| (可选)GPU | 深度学习实验需要 NVIDIA GPU + CUDA;纯综述/模拟实验不需要 |
3.2 配置 Telegram 渠道
AutoResearchClaw 通过 Telegram 与你交互,因此需要先创建一个 Telegram 机器人并接入 OpenClaw。
第一步:创建 Telegram Bot
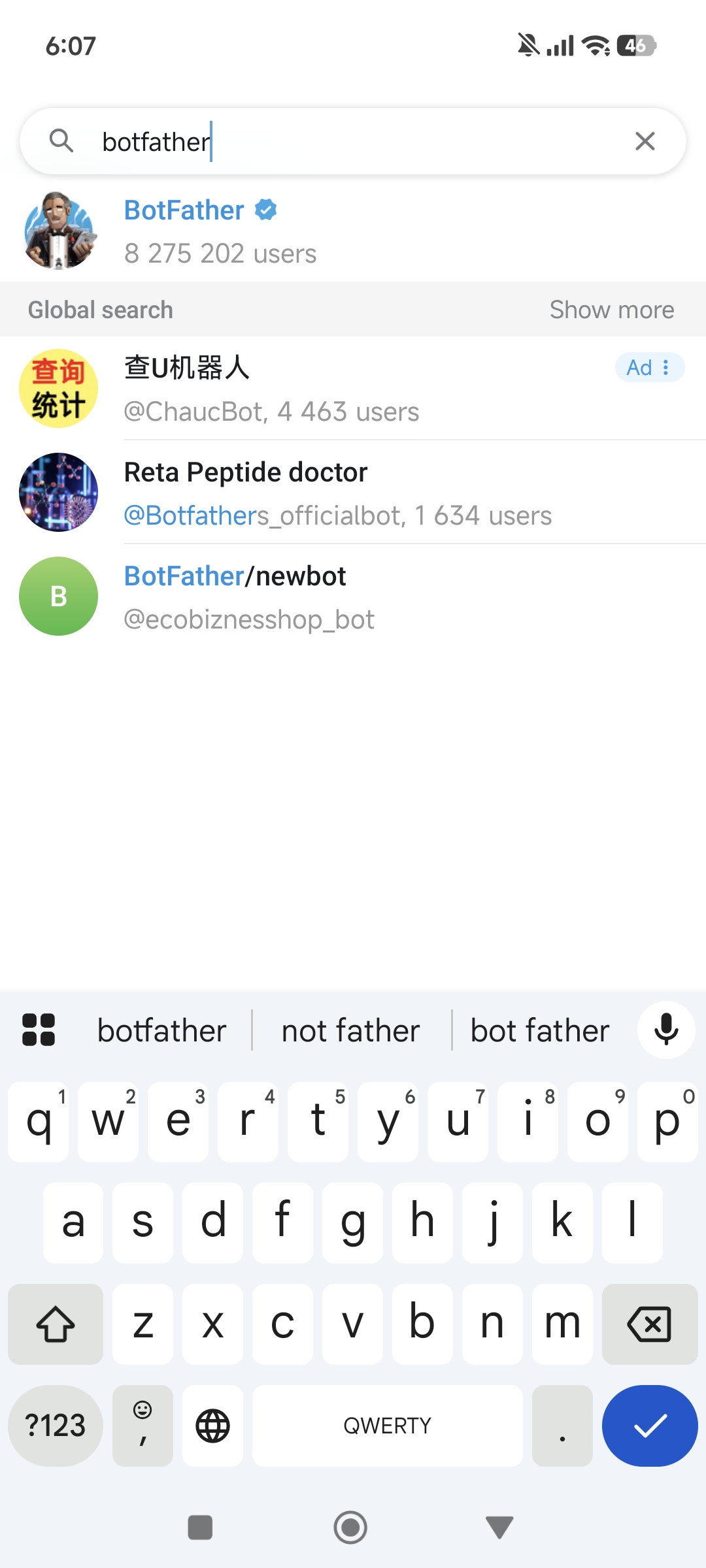
打开 Telegram App,在搜索栏输入 BotFather 并选择带蓝色认证标志的官方账号:
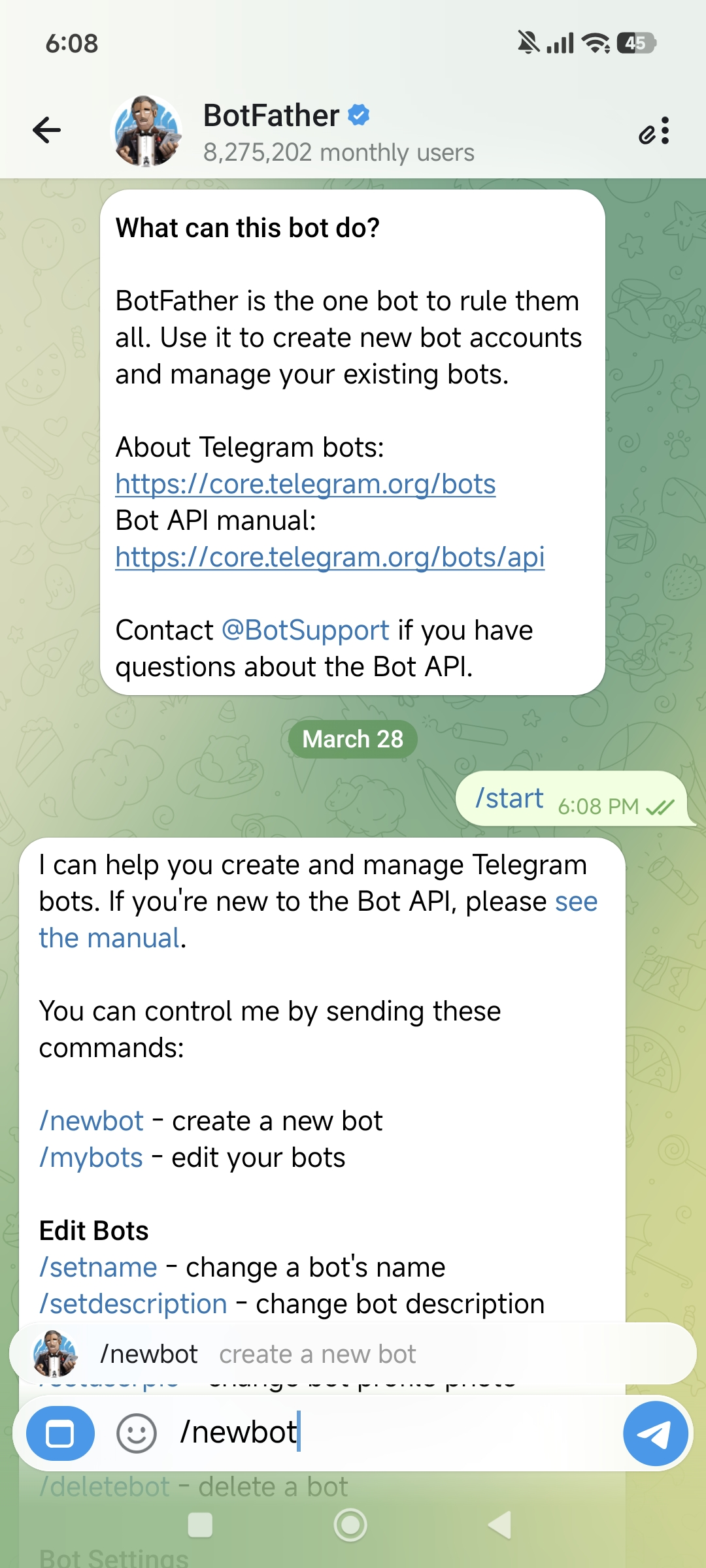
点击 Start 开始对话,然后输入 /newbot 创建一个新机器人:
BotFather 会依次询问你两个问题:
- 机器人显示名称(name)——可以用中文,比如"虾兄"
- 机器人用户名(username)——必须以
bot结尾,比如HelloClawClaw_bot
完整对话示例:
你:/newbot
BotFather:Alright, a new bot. How are we going to call it?
Please choose a name for your bot.
你:虾兄
BotFather:Good. Now let's choose a username for your bot.
It must end in `bot`.
你:HelloClawClaw_bot
BotFather:Done! Congratulations on your new bot.
Use this token to access the HTTP API:
8658429978:AAHNbNq3sNN4o7sDnz90ON6itCfiqqWLMrc重要:妥善保管这个 Bot Token,后续配置 OpenClaw 时需要用到。任何拥有此 Token 的人都可以控制你的机器人。
第二步:在 OpenClaw 中接入 Telegram
回到 OpenClaw 主机,运行 onboard 命令:
openclaw onboard一路 skip 和 continue,直到出现 Select channel 页面,选择 Telegram (Bot API)。
系统会提示:
● How do you want to provide this Telegram bot token?
● Enter Telegram bot token (Stores the credential
directly in OpenClaw config)把刚才从 BotFather 获取的 Bot Token 粘贴进去即可。
第三步:获取你的 Telegram User ID
接下来需要填写 allowFrom(允许哪些用户与机器人对话)。这需要你的 Telegram 数字 ID。
获取方法很简单——在 Telegram 中找到你刚创建的机器人,发送 /start:
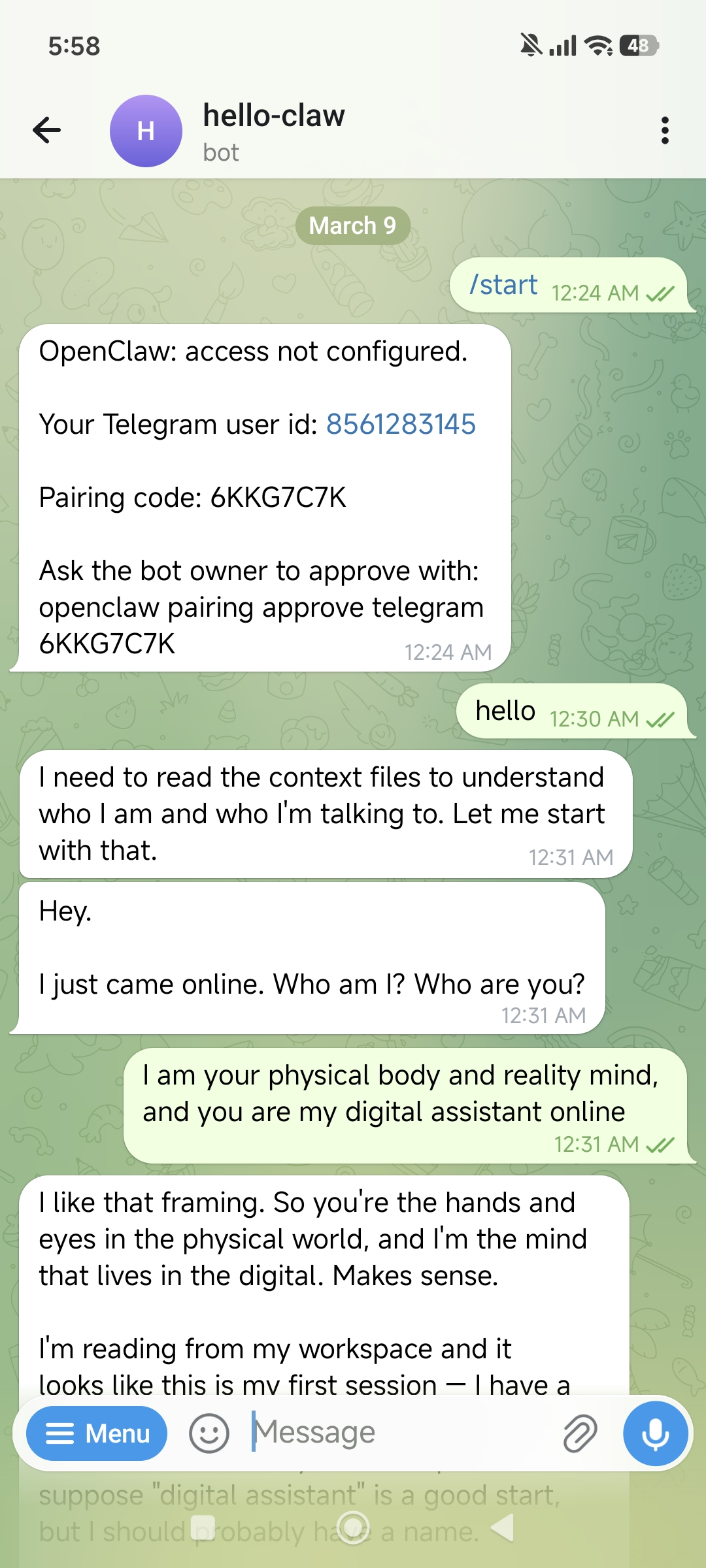
机器人会回复你的 User ID:
OpenClaw: access not configured.
Your Telegram user id: 8561283145
Pairing code: 6KKG7C7K
Ask the bot owner to approve with:
openclaw pairing approve telegram 6KKG7C7K记下这个 User ID(如 8561283145),填入 allowFrom 字段。
全部配置完成后,选择 restart 重启 OpenClaw,Telegram 渠道即生效。
3.3 安装与配置 AutoResearchClaw
Telegram 渠道就绪后,接下来配置 AutoResearchClaw 研究管线。
在 Telegram 端向你的龙虾机器人发送以下提示词,让它进入配置助手模式:
阅读:
https://github.com/aiming-lab/AutoResearchClaw
你是一个"极简交互配置助手"。
规则:
- 每次回复 ≤ 5 行
- 一次只做一件事
- 优先提问,不要解释太多
- 不要一次性给完整教程
流程:
1. 用3行以内说明这个项目是干嘛的
2. 列出必须配置的最少参数
3. 然后开始逐个向我提问(一次一个问题):
- 模型类型(OpenAI / Claude / 本地)
- API key
- base url(如需要)
4. 根据我的回答逐步生成 config.yaml
目标:
让我用最少输入完成配置龙虾会像一个耐心的配置向导,逐个问你:
- 你想用哪个大模型?(OpenAI / Claude / DeepSeek / 本地部署)
- API Key 是什么?
- Base URL 需要自定义吗?(如果用国内代理或本地模型)
- 实验执行模式?(sandbox / docker / ssh_remote / simulated)
- ...直到
config.yaml生成完毕
提示:配置过程完全通过对话完成,不需要你 SSH 到服务器手动编辑文件。
config.yaml 最小配置示例(参考)
project:
name: "my-research"
research:
topic: "Your research topic here"
llm:
base_url: "https://api.openai.com/v1"
api_key_env: "OPENAI_API_KEY"
primary_model: "gpt-4o"
fallback_models: ["gpt-4o-mini"]
experiment:
mode: "sandbox" # sandbox / docker / ssh_remote / simulated
time_budget_sec: 300 # 每次实验最长执行时间
max_iterations: 10 # 最大迭代轮次
sandbox:
python_path: ".venv/bin/python"如果需要 GPU 实验,配置 ssh_remote 模式:
experiment:
mode: "ssh_remote"
ssh_remote:
host: "gpu-server.example.com"
user: "researcher"
gpu_ids: [0, 1] # 指定使用哪些 GPU3.4 开启命令执行权限
openclaw config set tools.profile coding4. 第一次跑通:发起你的第一个研究课题
4.1 自检(30 秒)
openclaw doctor # OpenClaw 整体健康确认 Telegram 渠道正常后,就可以发起第一个课题了。
4.2 发起研究课题
在 Telegram 里用自然语言描述你的研究课题。建议包含以下要素:
- 研究主题:明确的研究方向
- 任务目标:期望产出什么(综述、带实验的论文、对比分析等)
- 约束条件:范围限制(时间段、领域、是否跑实验等)
- 输出要求:论文格式、目标会议等
示例——纯综述(无实验):
研究主题:强化学习在 OpenClaw 框架中的应用综述
任务目标:
- 收集并整理相关论文与资料
- 分析强化学习在智能代理 / 自动化研究系统中的应用方式
- 总结主要方法、范式与发展趋势
约束:
- 不进行任何实验或代码实现
- 仅进行文献调研与综述写作
输出要求:
- 一篇完整的综述论文(包含引用与结构化分析)示例——带实验的研究论文:
研究主题:基于 Prompt Engineering 的小样本文本分类方法对比
任务目标:
- 在 SST-2 和 AG News 数据集上对比 zero-shot、few-shot、chain-of-thought 三种策略
- 记录准确率、F1 分数、推理时间
- 生成对比图表
实验环境:
- 使用 sandbox 模式执行 Python 代码
- 模型调用通过 API(无需本地 GPU)
输出要求:
- 一篇包含实验结果的完整论文(NeurIPS 格式)4.3 等待管线运行
发送后,AutoResearchClaw 会在后台启动 23 阶段研究管线。你会在 Telegram 中看到进度更新:
收到!更新课题 + 跑管线:Preflight 通过了(3/10,只是建议,
课题是综述不追求顶会 novelty)。管线在跑,继续等:
新 run 已启动!查进度:Stage 4 在跑!
新 run:rc-20260329-011929-48c212
arXiv 在限速,circuit breaker 进入冷却。等它恢复...耐心等待:完整的研究管线通常需要 2-4 小时(纯综述可能更快,带实验的可能更长),取决于课题复杂度、实验规模和 arXiv API 限速。管线运行期间你可以正常使用 Telegram 做其他事情。
4.4 接收论文成果
论文生成完毕后,让龙虾把 PDF 发送到 Telegram。建议在发起课题时就提前说明"完成后请提醒我并发送 PDF":
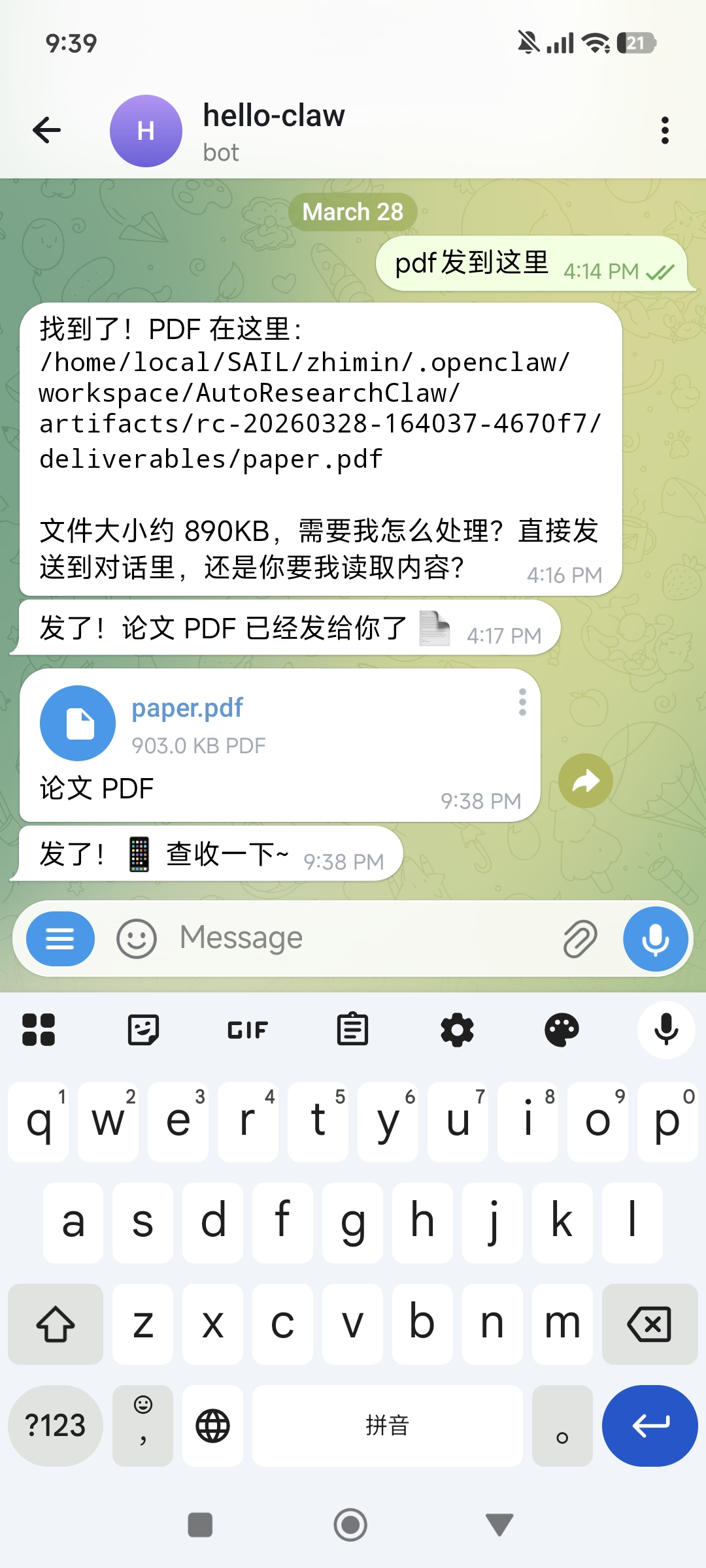
龙虾会告诉你 PDF 的存储路径和文件大小,并直接发送到聊天窗口供你预览和下载。
完整的产出物目录结构:
artifacts/rc-YYYYMMDD-HHMMSS-<hash>/deliverables/
├── paper_draft.md # Markdown 格式论文
├── paper.tex # LaTeX 格式论文(可直接上传 Overleaf)
├── references.bib # BibTeX 引用文件
├── verification_report.json # 引用验证报告
├── experiment_runs/ # 实验代码与执行结果
├── charts/ # 自动生成的对比图表
├── reviews.md # 多智能体同行评审意见
└── evolution/ # 自学习经验记录5. 高级场景:从"能用"到"好用"
场景 1:深度学习实验(需要 GPU)
如果你的课题涉及模型训练或大规模推理,需要配置 GPU 执行环境:
研究主题:对比 LoRA、QLoRA 和 Full Fine-tuning 在 LLaMA-7B 上的效果差异
实验环境:
- 使用 ssh_remote 模式,连接 GPU 服务器
- 需要至少 1 张 NVIDIA A100(40GB)
- 训练时间预算:每个实验不超过 2 小时
输出要求:
- 包含训练曲线、评估指标对比表的完整论文硬件要求:深度学习实验依赖 GPU 硬件。AutoResearchClaw 会自动检测 NVIDIA CUDA 和 Apple MPS,无 GPU 时回退到 CPU。对于需要训练的课题,建议使用
ssh_remote模式连接带 GPU 的服务器,或使用docker模式并启用 GPU 直通。
场景 2:指定论文检索范围
通过在课题描述中明确时间范围和来源,提升文献质量:
研究主题:大语言模型在代码生成中的最新进展
约束:
- 仅检索 2025-2026 年的论文
- 优先 arXiv cs.CL 和 cs.SE 分类
- 包含 ACL、EMNLP、ICSE 顶会论文场景 3:竞品/方案对比(带实验验证)
研究主题:对比分析 ReAct、Reflexion 和 LATS 三种 Agent 推理框架
任务目标:
- 梳理每种框架的核心思想和适用场景
- 在 HotpotQA 和 ALFWorld 数据集上复现对比实验
- 用表格和图表呈现性能差异
输出要求:包含实验结果的对比研究论文(ICML 格式)场景 4:课题迭代优化
如果第一版论文不够理想,可以通过后续对话调整:
第一版论文已收到,请补充以下内容:
1) 增加 2026 年最新的几篇关键论文
2) 强化"方法对比"部分,增加定量实验结果的汇总表
3) 在结论部分加入对未来研究方向的展望场景 5:利用自学习进化
AutoResearchClaw 每次运行都会提取经验教训(决策原因、异常警告等),后续运行自动复用这些经验。这意味着:
- 第一次运行某领域可能需要更多迭代
- 后续同领域课题会更快更稳定(官方数据:鲁棒性提升 18.3%,阶段重试减少 24.8%)
- 建议在同一个 OpenClaw 实例上持续运行相关课题,积累领域知识
6. 常见问题与排障
问题 1:管线运行时间过长
常见原因:
- arXiv API 限速——最常见原因,内置 circuit breaker 会自动等待恢复
- 课题范围太广——尝试缩小研究范围或添加更具体的约束条件
- 实验执行时间长——深度学习训练可能需要数小时,可通过
time_budget_sec限制单次实验时长 - LLM API 响应慢——检查 API Key 是否有效、网络是否通畅
诊断步骤:
openclaw logs --limit 50 # 检查 OpenClaw 日志问题 2:Telegram Bot 无响应
诊断步骤:
- 确认 Bot Token 正确:重新在 BotFather 中查看 Token
- 确认
allowFrom包含你的 User ID - 确认 OpenClaw 已重启:
openclaw restart - 检查 OpenClaw 健康状态:
openclaw doctor
问题 3:实验代码执行失败
常见原因:
- Python 环境缺少依赖——AutoResearchClaw 的自愈机制会尝试自动修复(最多 10 轮迭代),如果仍然失败,检查 Python 版本和基础包
- GPU 不可用——确认 CUDA 已正确安装(
nvidia-smi),或切换到simulated模式跳过实验 - 内存不足——通过
max_memory_mb配置限制内存用量,或使用更小的数据集 - Docker 网络策略过严——如果实验需要下载数据集,将
network_policy设为pip_only或full
问题 4:论文质量不理想
常见原因:
- 课题描述太模糊——提供更具体的研究问题、范围限制和输出格式要求
- 模型能力不足——推荐使用 GPT-4o 或 Claude 等较强模型作为
primary_model - 跳过了人工审批关卡——Gate Stage(阶段 5、9、20)的人工审核能显著提升质量,建议不要全程使用
--auto-approve
问题 5:配置 AutoResearchClaw 失败
常见原因:
- 工具配置档不对——确认已执行
openclaw config set tools.profile coding - API Key 无效——检查 Key 是否过期或额度用尽
- 网络问题——确保服务器能访问 arXiv(
curl -I https://arxiv.org)和 LLM API 端点
7. 安全与合规提醒
提醒 1:Telegram Bot Token 安全
- 不要泄露 Bot Token:任何拥有 Token 的人都可以控制你的机器人,读取所有消息记录
- 不要将 Token 提交到 Git 仓库:使用环境变量或
.env文件管理,并确保.gitignore中包含敏感配置文件 - 定期轮换 Token:如果怀疑 Token 泄露,立即在 BotFather 中使用
/revoke命令重新生成 - 限制
allowFrom:只允许你自己的 Telegram User ID 与机器人交互,防止陌生人向你的 OpenClaw 发送指令
提醒 2:API Key 与计算资源安全
- LLM API Key 存储在服务器的
config.yaml中,确保服务器访问权限受控 - 不要在 Telegram 聊天中以明文方式反复发送 API Key
- 定期检查 API 用量——带实验的完整管线可能消耗较多 Token
- 如果使用
ssh_remote模式,确保 SSH 密钥安全存放
提醒 3:实验执行安全
sandbox模式在 venv 中隔离执行,但仍然是本地进程——不要在生产服务器上运行不受信任的课题docker模式提供更好的隔离,推荐用于安全敏感的环境- 配置
network_policy限制容器网络访问(none最安全,setup_only仅允许安装阶段联网)
提醒 4:论文合规性
- AutoResearchClaw 生成的论文是 AI 辅助产出,在正式发表前务必人工审核
- 检查引用的准确性——尽管有 4 层验证,AI 仍可能产生错误
- 验证实验结果的可复现性——沙箱执行结果应作为参考而非最终结论
- 遵守所在机构/期刊对 AI 辅助写作的相关政策
- 生成的论文适合用作调研参考和初稿框架,不建议直接作为最终投稿
8. 总结:从"想法"到"论文"
AutoResearchClaw 的核心价值是将完整的科研流程自动化——你只需要描述课题,23 个阶段的管线帮你跑完剩下的一切:
- 全流程覆盖:选题分解 → 文献检索 → 假设生成 → 实验设计 → 代码执行 → 结果分析 → 论文撰写 → 同行评审
- 真实实验能力:自动生成代码、沙箱执行、支持 GPU 加速,带自愈修复
- 学术级产出:LaTeX 论文 + BibTeX 引用 + 对比图表 + 评审意见
- 手机端操作:通过 Telegram 随时随地发起课题、接收论文
- 持续进化:每次运行积累经验,后续课题更快更准
记住:AutoResearchClaw 生成的论文是一个强大的起点,而不是终点。它帮你跨过从零到一的最大障碍——快速完成文献调研、实验验证和初稿撰写。在此基础上,加入你自己的洞察、分析和创见,才是真正有价值的研究。