本章讲 算法和 算法。 算法可以看作是 算法在连续动作空间上的一种扩展,但结构上仍然更像是 算法。 算法则是对 算法的一种改进,主要是为了克服 算法在实际应用中存在的一些缺点,包括过估计偏差、训练不稳定等问题。
DPG 算法
在经典策略梯度算法中,我们学习的是一个随机性策略( ),即通过学习一个概率分布 来选择动作 。对于连续动作空间,我们通常会选择高斯分布来表示这个概率分布,但是这种策略往往计算成本较高,且对动作采样的方差较大,导致训练过程不稳定。
在某些情况下,使用确定性策略( )可能会更加高效。确定性策略直接将状态映射到一个具体的动作,而不是一个概率分布,如式 所示。
对应的策略梯度表达式如式 所示。
这就是确定性策略梯度( , )算法的核心,其中 是策略的初始分布。
DDPG 算法
基于 方法, 算法在引入神经网络近似的同时,增加了一些要素,如式 所示。
其中目标网络和经验回放在 算法中已经介绍过了,这里我们主要讲讲 噪声,引入噪声的目的是为了增加策略的探索性,从而提高算法的性能和稳定性,如式 所示。
其中 是 过程在时间 的值,即当前的噪声值, 是回归到的均值, 是 过程的回归速率, 是 过程的扰动项, 是布朗运动( )或者维纳过程( ),是一个随机项,表示随机高斯噪声的微小变化。
代入到 算法中,最终的动作选择如式 所示。
噪声是一种具有回归特性的随机过程,其与高斯噪声相比的优点在于:
- 探索性: 噪声具有持续的、自相关的特性。相比于独立的高斯噪声, 噪声更加平滑,并且在训练过程中更加稳定。这种平滑特性使得OU噪声有助于探索更广泛的动作空间,并且更容易找到更好的策略。
- 控制幅度: 噪声可以通过调整其参数来控制噪声的幅度。在 算法中,可以通过调整 噪声的方差来控制噪声的大小,从而平衡探索性和利用性。较大的方差会增加探索性,而较小的方差会增加利用性。
- 稳定性: 噪声的回归特性使得噪声在训练过程中具有一定的稳定性。相比于纯粹的随机噪声,在 算法中使用 噪声可以更好地保持动作的连续性,避免剧烈的抖动,从而使得训练过程更加平滑和稳定。
- 可控性:由于 噪声具有回归特性,它在训练过程中逐渐回归到均值,因此可以控制策略的探索性逐渐减小。这种可控性使得在训练的早期增加探索性,然后逐渐减小探索性,有助于更有效地进行训练。
最后, 算法的整体流程如图 所示,完整的代码实现可参考实战部分的内容。
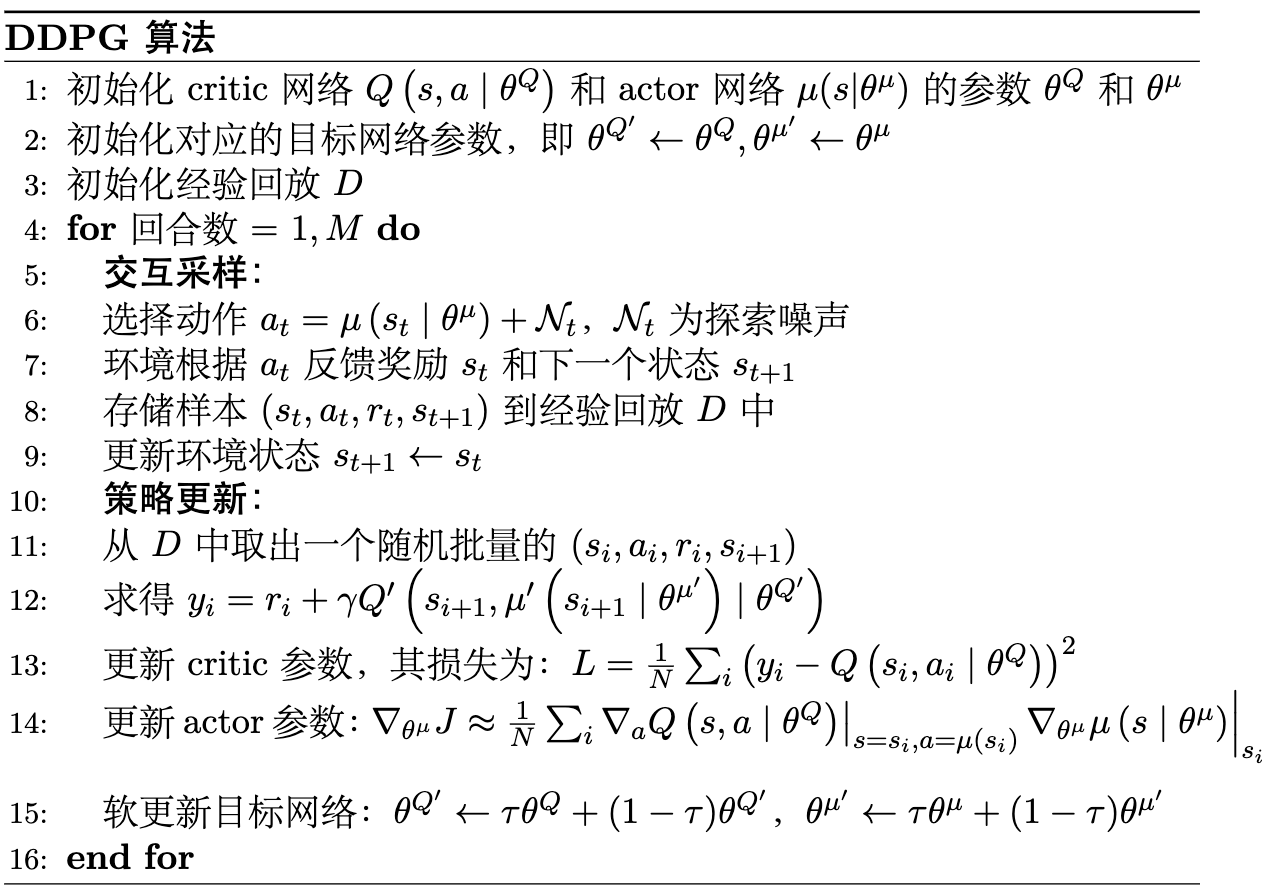 图 1: DDPG 算法流程
图 1: DDPG 算法流程注意,跟 算法中使用的硬更新不同, 算法中目标网络的更新一般使用软更新( )的方式,这样可以使得目标网络的参数更加平滑地变化,从而提高训练的稳定性和收敛性。
TD3 算法
算法虽然在连续动作空间中表现不错,但有个很大的缺点,那就是它容易出现 值的过估计问题( ),这会导致策略学习的不稳定,甚至发散。为了解决这个问题, 算法( )提出了三种关键的改进技巧,一是双 网络,二是延迟更新,三是目标策略平滑。
双 Q 网络
在 算法中,只有一个 网络来估计动作的价值,这可能会导致 值的过估计问题。为了解决这个问题, 算法引入了双 网络的概念,即使用两个独立的 网络来估计动作的价值。在计算目标值 时,取两个 值中的较小值作为目标值,从而减少过估计的风险,如式 所示。
对应的损失函数如式 所示。
延迟更新
延迟更新( )是指在 算法中, 网络的更新频率要低于 网络的更新频率。具体来说, 网络每隔一定数量的时间步才会更新一次,而 网络则在每个时间步都进行更新。 这样做的目的是为了减少策略更新的频率,从而提高训练的稳定性。
举个例子, 就好比领导, 则好比员工,领导不断给员工下达目标,员工不断地去完成目标,如果领导的决策经常失误,那么员工就很容易像无头苍蝇一样不知道该完成哪些目标。
因此,一个好的解决方式就是让领导学得比员工更快,领导学得更快了之后下达目标的失误率就会更低,这样员工就能够更好地完成目标了,从而提高整个团队的效率。在实践中, 的更新频率一般要比 的更新频率低一个数量级,例如 每更新 次, 只更新 次。
目标策略平滑
目标策略平滑( )是指在计算目标值 时,给目标策略添加一些噪声,从而使得目标策略更加平滑,减少过估计的风险,也叫噪声正则( )。
在延迟更新中,我们的主要思想是通过提高 的更新频率来减少值函数的估计误差,也就是“降低领导决策的失误率”。但是这样其实是治标不治本的做法,因为它只是让 带来的误差不要过分地影响到了 ,而没有考虑改进 本身的稳定性。
因此,我们也可以给 引入一个噪声提高其抗干扰性,这样一来就可以在一定程度上提高 的稳定性,从而进一步提高算法的稳定性和收敛性。注意,这里的噪声是在 网络上引入的,而不是在输出动作上引入的,因此它跟 算法中的噪声是不一样的。具体来说,我们可以在计算 误差的时候,给目标值 加上一个噪声,并且为了让噪声不至于过大,还增加了一个裁剪( ),如式 所示。
其中 表示均值为 ,方差为 的高斯噪声, 表示噪声, 表示裁剪函数,即将噪声裁剪到 的范围内, 是一个超参数,用于控制噪声的大小。
算法是 算法吗?为什么?
跟 一样, 算法,主要结合了经验回放、目标网络和确定性策略,是典型的 算法。
软更新相比于硬更新的好处是什么?为什么不是所有的算法都用软更新?
好处:平滑目标更新:软更新通过逐渐调整目标网络的参数,使其向主网络的参数靠近,而不是直接复制主网络的参数。这样做可以降低目标的变化幅度,减少了训练中的不稳定性;降低方差;避免振荡:软更新可以减少目标网络和主网络之间的振荡,这有助于更稳定地收敛到良好的策略。缺点:速度:软更新会使目标网络变得更加缓慢;探索和稳定性权衡:一些算法可能更倾向于使用硬更新,因为它们可能需要更频繁地探索新的策略,而不依赖于过去的经验。硬更新允许在每次更新时完全用新策略替代旧策略;算法需求:某些算法可能对硬更新更敏感,而且硬更新可能是这些算法的关键组成部分。综上,软更新和硬更新都有其用途,选择哪种方式取决于具体的问题和算法要求。
相比于 算法, 算法做了哪些改进?请简要归纳。
双Q网络: 使用了两个独立的 网络,分别用于估计动作的价值。这两个Q网络有不同的参数,这有助于减少估计误差,并提高了训练的稳定性;目标策略噪声:与 不同, 将噪声添加到目标策略,而不是主策略。这有助于减小动作值的过估计误差;目标策略平滑化: 使用目标策略平滑化技术,通过对目标策略的参数进行软更新来减小目标策略的变化幅度。这有助于提高稳定性和训练的收敛性。延迟策略更新: 引入了延迟策略更新,意味着每隔一定数量的时间步才更新主策略网络。这可以减小策略更新的频率,有助于减少过度优化的风险,提高稳定性。
算法中 的更新频率一般要比 是更快还是更慢?为什么?
答: 网络的更新频率要比 网络更快,即延迟策略更新。延迟策略更新的目的是减小策略更新的频率,以避免过度优化和提高训练的稳定性。因为 网络的更新频率更高,它可以更快地适应环境的变化,提供更准确的动作价值估计,从而帮助 网络生成更好的策略。