算法的核心思想是在 算法的基础上引入深度神经网络来近似动作价值函数 ,从而能够处理高维的状态空间。此外, 算法还引入了一些技巧,如经验回放和目标网络等,来提高训练的稳定性和效果。
Q 网络
在深度学习基础章节中,我们演示了如何使用神经网络来近似状态价值函数 并使用梯度下降和 误差来更新网络参数。类似地,我们也可以使用神经网络来近似动作价值函数 ,回顾 算法的更新公式,如式 所示。
其中 表示期望或目标的 值, 表示实际的 值, 是学习率。引入神经网络近似 函数后,如式 所示。
其中参数 是神经网络的参数,可以通过梯度下降的方式来优化。具体来说,可以以最小化 误差为目标,即最小化目标 值和实际 值之间的差距,如式 所示。
注意,由于是基于 更新的,因此依然需要判断终止状态,如式 所示。
经验回放
在 算法中,我们每次执行一步交互得到一个样本之后,就立即用这个最新的样本去更新 函数,如式 所示。
这种更新方式在引入神经网络后会带来一些问题。首先,每次用单个样本去迭代网络参数很容易导致训练的不稳定,从而影响模型的收敛。其次,每次迭代的样本都是从环境中实时交互得到的,这样的样本是在时间上是连续的,即是有关联的,这与梯度下降法的数据假设不符,即训练集中的样本必须是独立同分布的。此外,每个样本只被使用一次就被丢弃,数据使用率较低,而在强化学习中与环境交互产生样本的成本往往较高,较低的数据使用率会严重影响训练效率。
为了解决这些问题, 算法引入了经验回放机制。具体来说,我们会将每次与环境交互得到的样本 存储在一个经验回放池( )中,如式 所示。
然后在每次更新网络参数时,我们会从经验回放池中随机抽取一个小批量的样本进行训练,如式 所示。
其中下标 表示从经验回放池中随机抽取的样本,意味着不再跟时间相关, 是小批量的样本数量。利用这些样本,我们可以计算对应的目标 值 ,并使用梯度下降的方法来更新网络参数 ,如式 所示。
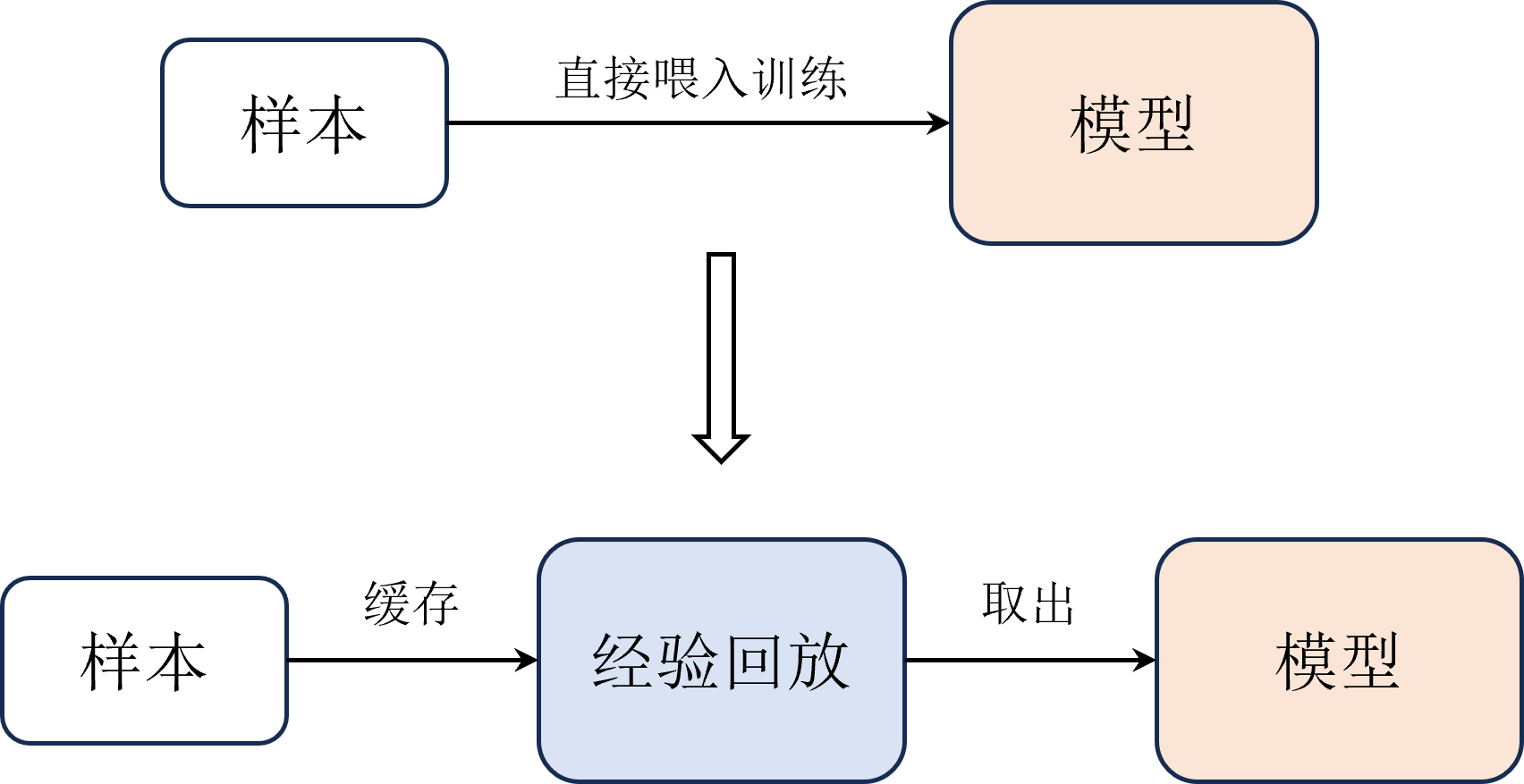
如图 1 所示,不同于 算法每次用最新的样本直接喂入神经网络去更新网络模型, 算法会把每次与环境交互得到的样本都存储在一个经验回放中,然后每次从经验池中随机抽取一批样本来训练网络。
图 1: 经验回放示例
目标网络
注意到在式 中,目标值 的参数 与 实际值即当前网络 的参数是相同的。这意味着网络要学习的目标会在每次更新时发生变化,等价于我们在追逐一个不断移动的目标,这很容易造成训练的不稳定,甚至损失发散导致无法收敛(即训练失败)。
为了解决这个问题, 算法引入了目标网络( )的概念。具体来说,我们会维护一个与当前网络结构相同但参数不同的目标网络 ,并使用目标网络来计算目标 值,如式 所示。
目标网络的参数 会定期地从当前网络的参数 复制过来,如式 所示。
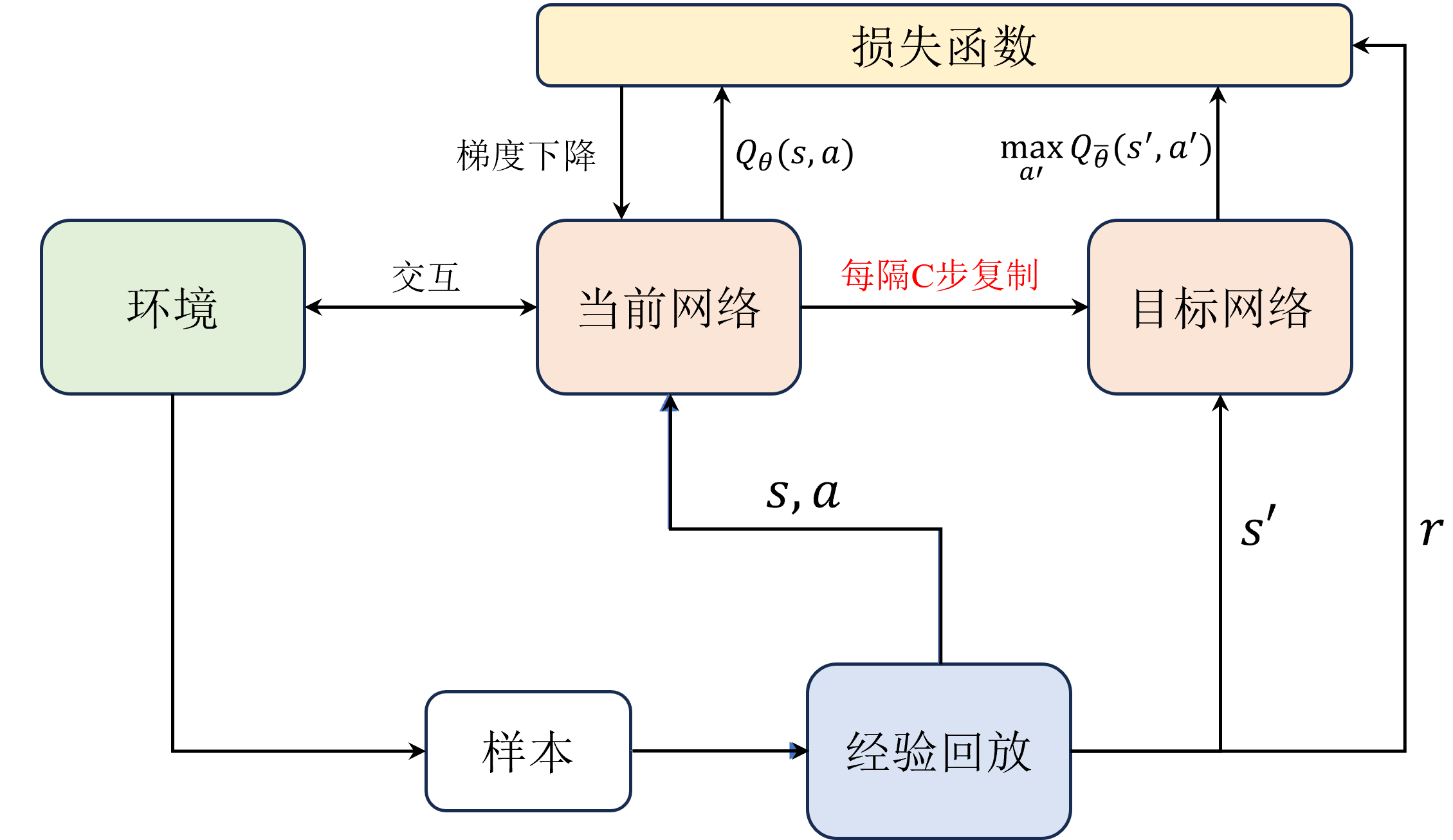
其中 是一个超参数,表示每隔多少步更新一次目标网络的参数。这样一来,目标网络的参数在会在一定时间内保持不变,从而使得目标 值相对稳定,避免了追逐不断移动的目标的问题,提高了训练的稳定性和收敛性,如图 2 所示。
图 2: 目标网络示例
另外,式 中的更新方式被称为硬更新( ),即每隔 步直接将当前网络的参数复制给目标网络。除此之外,还有一种软更新( )的方式,即每次更新时将目标网络的参数向当前网络的参数靠近一点,如式 所示。
其中 是一个超参数,通常取值很小(如 ),表示每次更新时目标网络参数向当前网络参数靠近的比例。注意,软更新的方式在 算法中并不常用,原因是硬更新已经能够很好地解决目标不稳定的问题,但在一些后续的强化学习算法例如 和 中被广泛采用。
算法流程
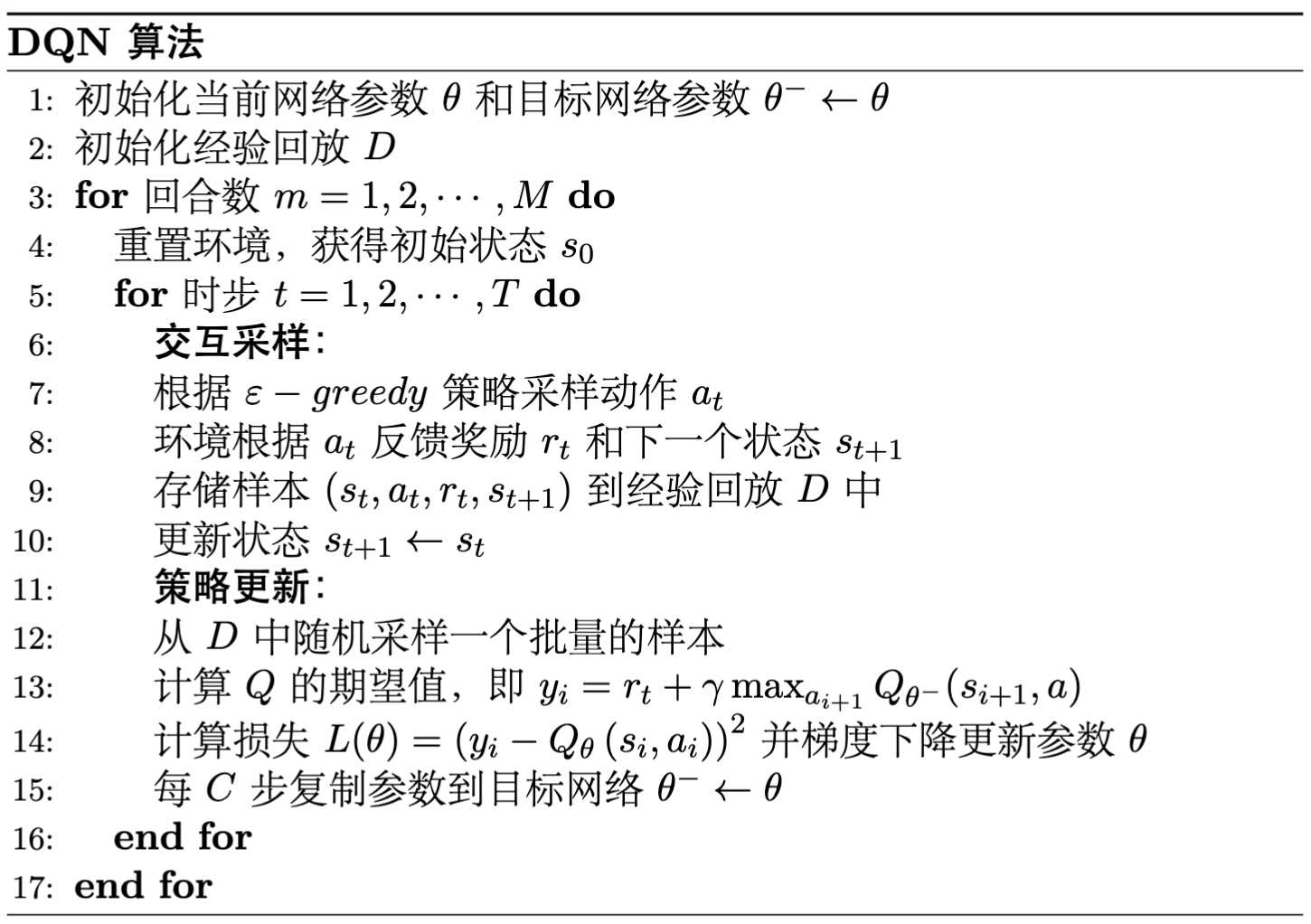
算法的完整流程如图 3 所示,包括初始化网络和经验回放池、与环境交互采样、存储样本到经验回放池、从经验回放池中随机采样小批量样本、计算目标 值和损失函数、更新网络参数以及定期更新目标网络参数等步骤,完整的代码实现可参考实战部分的内容。
图 3: DQN 算法流程
相比于 算法, 算法做了哪些改进?
答:主要包括:引入深度神经网络: 算法中使用的是表格法来存储动作价值函数,但对于状态空间较大的问题,表格法会变得不可行。 通过引入深度神经网络来近似动作价值函数,能够处理高维连续状态空间的问题。经验回放:传统的 算法每次更新时只使用当前状态和动作的信息,但这种方式可能会导致样本之间的相关性和不稳定性。 采用经验回放机制,将所有的状态、动作、奖励、下一状态组成的经验存储在经验池中,然后从经验池中随机取样进行训练,可以缓解样本相关性和不稳定性的问题。目标网络: 还引入了目标网络来解决动作价值函数的不稳定性问题。目标网络是一个与当前神经网络结构相同的网络,但其参数被固定一段时间。在训练时,使用目标网络来计算目标Q值,从而减少当前神经网络参数对目标Q值的影响,提高训练稳定性。奖励裁剪:在某些情况下,奖励值可能非常大或非常小,这可能会导致训练不稳定。DQN采用奖励裁剪,将奖励值限制在一个较小的范围内,从而在一定程度上提高了训练稳定性。
为什么要在 算法中引入 策略?
答:目的是为了平衡探索和利用的关系。具体来说, 策略会以一定的概率 随机选择动作,以一定的概率 选择当前状态下具有最大 值的动作,从而在训练过程中保证一定的探索性,使得智能体能够尝试一些未知的状态和动作,从而获得更多的奖励。如果在训练过程中完全按照当前状态下的最大Q值选择动作,可能会导致智能体过于保守,无法获得更多的奖励。而如果完全随机选择动作,可能会导致智能体无法学习到更优的策略,从而影响学习效果。因此,引入 策略可以在探索和利用之间进行平衡,从而在训练过程中获得更好的性能。需要注意的是, 策略中的 值是一个重要的超参数,需要根据具体问题进行调整。如果 值过小,可能会导致智能体无法充分探索环境;如果 值过大,可能会导致智能体无法有效地利用已有的经验。因此,需要根据具体问题进行调参。
算法为什么要多加一个目标网络?
答:目标网络的作用是为了解决动作价值函数的不稳定性问题。目标网络是一个与当前神经网络结构相同的网络,但其参数被固定一段时间。在训练时,使用目标网络来计算目标 值,从而减少当前神经网络参数对目标 值的影响,提高训练稳定性。具体来说,当使用当前神经网络来计算目标 值时,当前神经网络的参数和目标 值的计算都是基于同一批数据的,这可能导致训练过程中出现不稳定的情况。而使用目标网络来计算目标 值时,目标网络的参数是固定的,不会受到当前神经网络的训练过程的影响,因此可以提高训练的稳定性。同时,目标网络的更新也是基于一定的规则进行的。在每个训练步骤中,目标网络的参数被更新为当前网络的参数的加权平均值,其权重由一个超参数 控制。通过这种方式,目标网络的更新过程可以更加平稳,避免了训练过程中出现剧烈的波动,从而提高了训练的效率和稳定性。因此,引入目标网络是 算法的一个重要改进,可以显著提高算法的性能和稳定性。
经验回放的作用是什么?
答:经验回放主要作用在于缓解样本相关性和不稳定性问题,提高算法的训练效率和稳定性。缓解样本相关性问题:在深度强化学习中,每个样本通常都是与前几个样本高度相关的。如果直接使用当前样本进行训练,可能会导致样本之间的相关性过高,从而影响算法的训练效果。经验回放机制通过从经验池中随机取样,可以打破样本之间的相关性,提高训练的效果。缓解不稳定性问题:在深度强化学习中,每个样本的值函数都是基于当前神经网络的参数计算的。由于神经网络的参数在每个训练步骤中都会发生变化,因此每个样本的值函数也会随之变化。这可能会导致算法的训练过程不稳定,经验回放机制可以通过随机取样的方式,减少每个训练步骤中样本值函数的变化,从而提高训练的稳定性。