Noisy DQN 算法实战
class NoisyLinear(nn.Module):
'''在Noisy DQN中用NoisyLinear层替换普通的nn.Linear层
'''
def __init__(self, input_dim, output_dim, std_init=0.4):
super(NoisyLinear, self).__init__()
self.input_dim = input_dim
self.output_dim = output_dim
self.std_init = std_init
self.weight_mu = nn.Parameter(torch.empty(output_dim, input_dim))
self.weight_sigma = nn.Parameter(torch.empty(output_dim, input_dim))
# 将一个 tensor 注册成 buffer,使得这个 tensor 不被当做模型参数进行优化。
self.register_buffer('weight_epsilon', torch.empty(output_dim, input_dim))
self.bias_mu = nn.Parameter(torch.empty(output_dim))
self.bias_sigma = nn.Parameter(torch.empty(output_dim))
self.register_buffer('bias_epsilon', torch.empty(output_dim))
self.reset_parameters() # 初始化参数
self.reset_noise() # 重置噪声
def forward(self, x):
if self.training:
weight = self.weight_mu + self.weight_sigma * self.weight_epsilon
bias = self.bias_mu + self.bias_sigma * self.bias_epsilon
else:
weight = self.weight_mu
bias = self.bias_mu
return F.linear(x, weight, bias)
def reset_parameters(self):
mu_range = 1 / self.input_dim ** 0.5
self.weight_mu.data.uniform_(-mu_range, mu_range)
self.weight_sigma.data.fill_(self.std_init / self.input_dim ** 0.5)
self.bias_mu.data.uniform_(-mu_range, mu_range)
self.bias_sigma.data.fill_(self.std_init / self.output_dim ** 0.5)
def reset_noise(self):
epsilon_in = self._scale_noise(self.input_dim)
epsilon_out = self._scale_noise(self.output_dim)
self.weight_epsilon.copy_(epsilon_out.ger(epsilon_in))
self.bias_epsilon.copy_(self._scale_noise(self.output_dim))
def _scale_noise(self, size):
x = torch.randn(size)
x = x.sign().mul(x.abs().sqrt())
return x
根据写好的
class NoisyQNetwork(nn.Module):
def __init__(self, state_dim, action_dim, hidden_dim=128):
super(NoisyQNetwork, self).__init__()
self.fc1 = nn.Linear(state_dim, hidden_dim)
self.noisy_fc2 = NoisyLinear(hidden_dim, hidden_dim)
self.noisy_fc3 = NoisyLinear(hidden_dim, action_dim)
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.noisy_fc2(x))
x = self.noisy_fc3(x)
return x
def reset_noise(self):
self.noisy_fc2.reset_noise()
self.noisy_fc3.reset_noise()
注意在训练过程中,我们需要在每次更新后重置噪声,这样有助于提高训练的稳定性,更多细节请参考
import torchrl
class NoisyQNetwork(nn.Module):
def __init__(self, state_dim, action_dim, hidden_dim=128):
super(NoisyQNetwork, self).__init__()
self.fc1 = nn.Linear(state_dim, hidden_dim)
self.noisy_fc2 = torchrl.NoisyLinear(hidden_dim, hidden_dim,std_init=0.1)
self.noisy_fc3 = torchrl.NoisyLinear(hidden_dim, action_dim,std_init=0.1)
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.noisy_fc2(x))
x = self.noisy_fc3(x)
return x
def reset_noise(self):
self.noisy_fc2.reset_noise()
self.noisy_fc3.reset_noise()
同样我们展示一下它在
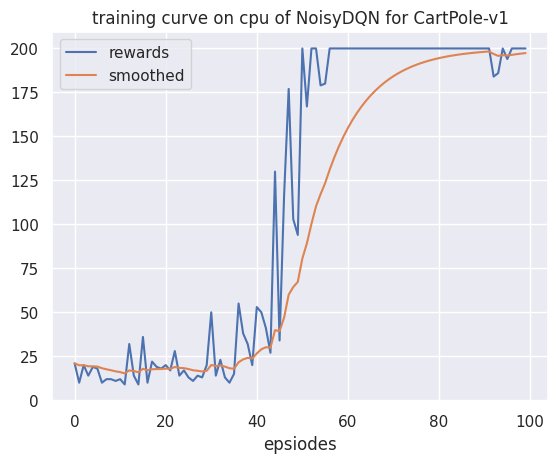
图 1