Intellectual Foundations
The First Foundation: Craik's Miniature Model (1943)
British psychologist Kenneth Craik wrote a slim book during World War II, The Nature of Explanation [1]. He proposed an idea far ahead of its time:
"If the organism carries a 'small-scale model' of external reality and of its own possible actions within its head, it is able to try out various alternatives, conclude which is the best of them, react to future situations before they arise."
Craik argued that the brain is not a passive black box that receives stimuli and emits responses. Instead, it actively maintains an internal simulator. This simulator can fast-forward into the future and replay the past, allowing a creature to filter out the best action before any real cost is incurred.
Perception feeds the internal model, which generates predictions to guide decisions. Prediction errors flow back to correct the model.
Tragically, Craik died in a bicycle accident in 1945 at only 31 years old. His ideas lay dormant for decades, only to be rediscovered with the rise of cognitive science and neuroscience.
The Brain's Prediction Mechanism: Predictive Coding (1990s)
In the 1990s, neuroscientists began using predictive coding to explain how the brain works.
The core idea is surprisingly simple.
The brain does not "see" the world; it predicts the world and then only processes the parts it got wrong.
The visual cortex does not faithfully relay every pixel from the eyes to higher brain areas, which would be far too costly energetically. Instead, higher-level areas continuously send predictions downward to lower-level areas, which only need to propagate the error between the prediction and the actual sensory signal back up.
When you walk into a familiar room, the brain hardly needs to process anything because everything is within expectation. But if a chair has been moved, that misaligned signal is immediately amplified and draws attention.
This mechanism explains why we are so sensitive to change and so oblivious to familiar backgrounds: the accurately predicted parts are compressed away, and only errors are worth transmitting.
The Insight from Control Theory: The Internal Model Principle (1960s)
Around the same time, the field of control engineering independently arrived at a similar insight. In the 1960s, the Internal Model Principle was formally stated:
To achieve perfect control of a system, the controller must contain an internal model of that system.
This sounds like engineering jargon, but the intuition is clear: a self-driving car maintaining its lane through a curve must have an algorithm that "knows" how the vehicle behaves dynamically in a curve, not through reaction, but through anticipation.
This principle appears throughout robotics, spacecraft control, and economic modeling, and it became the theoretical foundation for model-based methods in reinforcement learning. To control something, you must first understand it. The Internal Model Principle turns this commonsense observation into a mathematical necessity.
The Skeptic's Reply, and a 2025 Proof
Not everyone agreed. In 1991, roboticist Rodney Brooks argued the opposite in Intelligence without Representation: "the world is its own best model." His claim was that an agent does not need to carry a model of its environment at all; it can act intelligently through a tight, reflexive loop of sensing and acting, letting the real world serve as its own always-up-to-date map. For decades this was not just a philosophical position. Model-free agents genuinely did generalize across diverse tasks without anyone building an explicit world model into them, which made Brooks' challenge hard to dismiss.
In 2025, researchers at Google DeepMind settled the question with a proof rather than another argument. In General Agents Need World Models, Richens, Abel, Bellot, and Everitt showed that any agent capable of generalizing across a broad range of goals must have implicitly learned a predictive model of its environment, and that this model can always be recovered from the agent's behavior alone, without ever inspecting its internals. Craik's 1943 intuition turns out to be a theorem about modern learned agents, not just a metaphor about brains.
📖 The theorem, for the curious: the paper formalizes the environment as a controlled Markov process with transition function
, and considers a bounded goal-conditioned agent, one whose failure rate on composite goals of depth up to is at most relative to the best possible policy. Its central result is that such an agent's policy alone determines a world model with error bounded by . As the agent grows more competent ( ) or is asked to handle longer-horizon goals (larger ), the recoverable world model becomes more accurate: learning a sufficiently general policy is informationally equivalent to learning an accurate world model. The paper also gives an algorithm that extracts this model purely by querying the agent with pairs of goals that differ in an either-or branch, such as "reach a state within attempts" versus "reach it in more than attempts," and reading off which goal the agent prefers. This result holds only for agents that plan over multi-step horizons; a purely myopic agent optimizing immediate reward can in principle avoid learning a world model, since it never needs to predict long-term consequences. It also does not overturn Brooks so much as bound his claim: agents that only ever face short-horizon goals genuinely can get by without a rich internal model, but no agent that generalizes across a broad range of long-horizon goals can avoid building one.
The practical upshot for this course: when a later chapter shows a system winning on some benchmark without an explicit, human-designed world model, the right question is not "does it have one?" but "where is it hiding?" A sufficiently competent goal-directed policy, including one produced by an LLM, is now known to encode a recoverable simulation of its environment even when no one trained it to.
A Common Confusion: Broad vs. Narrow World Models
Before entering the historical narrative, one conceptual boundary must be established clearly, because every example that follows touches it: the term "world model" does not mean the same thing in every context.
Broad World Models: Any Predictive Model Qualifies
Broadly speaking, any model that can predict "what happens next" can be called a world model.
- A language model predicting the next token (the basic unit a language model processes, which can be a word, a character, or a sub-word fragment) is a broad world model.
- A video generation model predicting the next frame is a broad world model.
- A weather forecasting model predicting tomorrow's temperature is a broad world model.
Under this definition, Veo, Sora, Genie, and Cosmos all fit under the "world model" umbrella. They genuinely learn statistical regularities of the world: how light and shadow change, how objects move, how scenes evolve.
Narrow World Models: Must Be Action-Conditioned
In robotics and reinforcement learning (RL), "world model" carries a stricter meaning: it must be conditioned on actions.
It is not merely "what does the next frame look like," but "what happens to the world after I take this action." Formally:
📖 Subscript convention: The subscript
tin formulas denotes the time step, a discrete counter:t=0is the first step,t=1is the second, and so on.is read as "the observation at time t," as "the action at time t," and as "the observation at the next time step." This subscript notation runs throughout the entire curriculum: any variable with a tsubscript refers to its value at that time step; at+1subscript refers to the next step's value.
Here a_t is the action the agent executes at time t. The presence of this one conditioning variable transforms the world model from a "bystander" into a "participant": it can tell you not only how the world will evolve, but what consequences your choices will bring.
A broad world model is a prophet, telling you "what will happen." A narrow world model is an advisor, telling you "what will happen if you do this." Robots need advisors, not only prophets.
Three Practical Classification Questions
When encountering a specific model, three questions quickly reveal which kind of world model it is:
| Dimension | Options | Representative Systems |
|---|---|---|
| What does it predict? | Pixels / raw frames | Video diffusion models |
| Latent vectors (low-dimensional compressed representations inside the network) | Dreamer (an RL system that trains a policy in latent space, covered in L02-L03), RSSM (the dynamics core of Dreamer, covered in L02) | |
| Structured state (no pixels, only information needed for decisions) | MuZero, TD-MPC | |
| Actions themselves (latent actions inferred automatically from video) | Genie | |
| Does it accept actions? | No, passive video prediction | Veo |
| Yes, given actions, controllable simulation | Dreamer, world model robots | |
| Learns its own actions, latent action | Genie | |
| What purpose does it serve? | Generating content (video, images) | Veo |
| Evaluating policies / counterfactual simulation | Autonomous driving testing | |
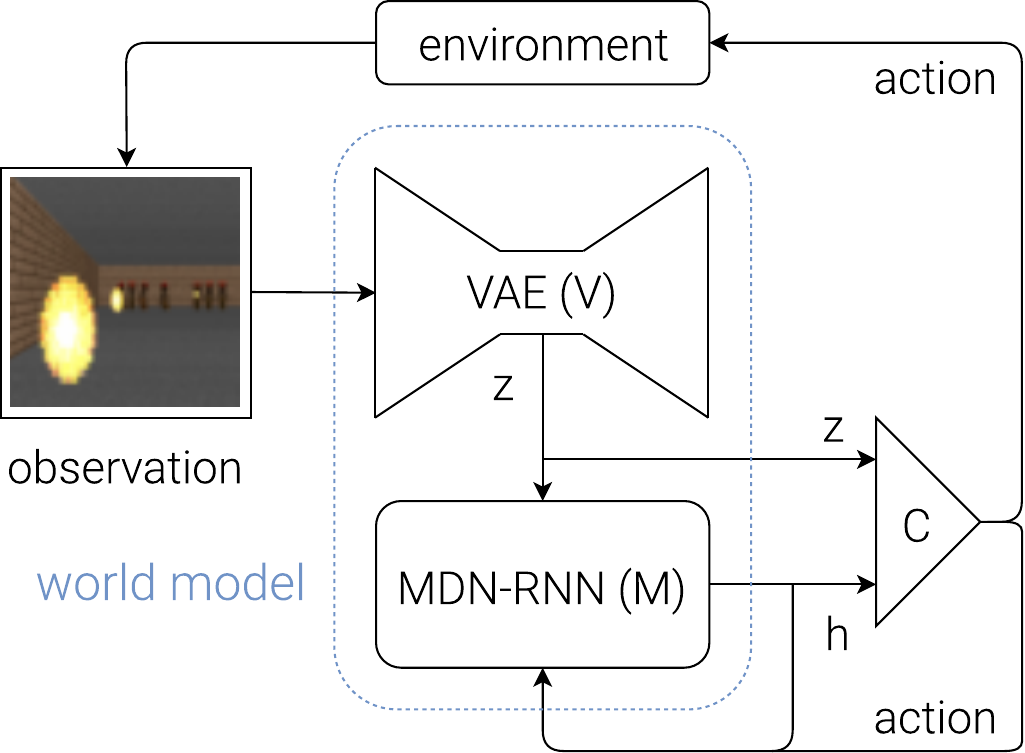
| Training a policy inside a "dream" | Dreamer, Ha & Schmidhuber | |
| Understanding physics, transferring knowledge | JEPA, foundation world models |
This curriculum focuses on narrow world models: action-conditioned dynamics models that can be used for planning and policy learning.