第8章:启发式的契约:接受"差不多对"需要多少勇气
A* 的启发函数如果撒了谎,它依然会给你一条路。只是那条路是错的。
一、1968年的赌注
1968年,斯坦福研究院的Peter Hart、Nils Nilsson和Bertram Raphael在一篇论文里提出了一个算法,后来这个算法被证明是人工智能历史上最优雅的思想之一。
他们要解决的问题很简单:让机器人Shakey在房间里找到从A点到B点的最短路径。
暴力搜索可以保证找到最优解——尝试所有可能的路径,选最短的那条。但Shakey的世界有数百万种可能的路径组合,暴力搜索需要的时间是天文数字。
贪心搜索很快——每次都朝着目标方向走。但它会撞上障碍物,走进死胡同,找到的路径可能比最优解长得多。
Hart三人提出的A*算法,做了一个看似不可能的承诺:我可以比暴力搜索快几个数量级,同时保证找到最优解。
这个承诺的代价是什么?一个契约。
如果你给A*一个”诚实”的启发函数——永远不高估剩余代价——它会信守承诺。但如果启发函数”撒谎”,高估了剩余代价,A*依然会给你一条路。只是那条路可能是错的。
这不是算法的bug,这是它的设计。A*用一个数学契约,换取了速度与最优性的平衡。
五十多年后,这个契约的思想依然是启发式算法的核心:当完美不可及时,我们需要明确代价的近似。
二、组合爆炸的诅咒
让我先量化”完美不可及”这件事。
2016年,AlphaGo击败李世石。全世界都在惊叹AI的”直觉”和”创造力”。但很少有人注意到一个技术细节:AlphaGo每一步棋的背后,是蒙特卡洛树搜索在19×19的棋盘上探索了数百万种可能。
不是数百种,不是数千种,是数百万种。
为什么需要这么多?因为围棋的状态空间大约是
即使每秒搜索
这不是工程问题,这是物理不可能。
类似的组合爆炸无处不在:
旅行商问题:访问n个城市的所有可能路线有
种。20个城市就是 种路线。 蛋白质折叠:一个100个氨基酸的蛋白质,每个氨基酸有3种主要构象,总共
种可能的折叠方式。 定理证明:在一阶逻辑里,长度为n的证明,可能的推理步骤数随n指数增长。
这就是启发式存在的理由:当最优解不可及时,我们需要”足够好”的解。
但”足够好”有多好?这不是一个模糊的工程问题,而是一个精确的数学问题。启发式算法必须遵守某些契约——如果违反了这些契约,它给出的”近似解”可能完全错误。
让我回到1968年,看看Hart、Nilsson和Raphael是如何设计这个契约的。
三、A*的数学契约
假设你在一个迷宫里,要从起点S走到终点G。每一步都有代价(比如时间或距离)。你想找到代价最小的路径。
暴力搜索(Dijkstra算法)会尝试所有可能的路径,保证找到最优解,但时间复杂度是
贪心搜索每次都选择”看起来离终点最近”的方向,速度很快,但可能走进死胡同。更糟糕的是,它可能找到的路径比最优解长几倍。
A*算法在1968年提出时,做了一个看似不可能的承诺:我可以比Dijkstra快,同时保证找到最优解。
它的核心是一个评估函数:
:从起点到节点n的实际代价(已知的,确定的) :从n到终点的估计代价(未知的,猜测的) :通过n到达终点的总估计代价
A*每次扩展
这个设计的直觉很简单:如果你已经走了10步到达节点n,而你估计还需要5步到达终点,那么通过n的总代价大约是15步。A*优先探索总代价最小的路径。
但这里有一个致命的问题:
如果
如果
Hart、Nilsson和Raphael证明了一个深刻的定理:如果启发函数满足可采纳性(admissibility),A*保证找到最优解。
可采纳性的定义:
其中
换句话说,启发函数必须是乐观的——永远不能高估剩余代价。你可以低估(这会让搜索变慢),但不能高估(这会让搜索找到错误答案)。
这就是A*的契约:给我一个可采纳的启发函数,我保证找到最优解。违反契约,保证失效。
为什么这个契约有效?让我用一个具体例子说明。
四、自己动手:看契约如何被打破
可采纳性不是一个抽象的数学要求。它是A*能否找到最优解的充要条件。
让我们亲手验证这件事。
实验目标:用同一个迷宫,分别用可采纳和不可采纳的启发函数运行A*,看看结果有什么不同。
迷宫地图(0=可通行,1=障碍物,S=起点,G=终点):
S . . . . .
. # # # # .
. . . . # .
. # # . # .
. . . . . GS是起点(0,0),G是终点(4,5)
.是可通行格子,每步代价=1#是障碍物,不可通行
任务:找从S到G的最短路径。
import heapq
# ------------------------------------------------------------------
# 定义迷宫:5行6列,1=障碍物,0=可通行
# S=(0,0),G=(4,5)
# ------------------------------------------------------------------
GRID = [
[0, 0, 0, 0, 0, 0], # 行0:S . . . . .
[0, 1, 1, 1, 1, 0], # 行1:. # # # # .
[0, 0, 0, 0, 1, 0], # 行2:. . . . # .
[0, 1, 1, 0, 1, 0], # 行3:. # # . # .
[0, 0, 0, 0, 0, 0], # 行4:. . . . . G
]
ROWS, COLS = len(GRID), len(GRID[0])
START = (0, 0)
GOAL = (4, 5)
def neighbors(r, c):
"""返回上下左右四个可通行邻居"""
for dr, dc in [(-1,0),(1,0),(0,-1),(0,1)]:
nr, nc = r+dr, c+dc
if 0 <= nr < ROWS and 0 <= nc < COLS and GRID[nr][nc] == 0:
yield nr, nc
def reconstruct_path(parent, node):
"""从 parent 字典回溯,重建路径"""
path = []
while node is not None:
path.append(node)
node = parent[node]
return list(reversed(path))
def astar(h_func, label="A*"):
"""
通用 A* 搜索。
h_func(r, c) 是启发函数;返回 (路径长度, 路径, 扩展节点数)。
"""
# 优先队列元素:(f, g, 节点)
open_heap = [(h_func(*START), 0, START)]
g_cost = {START: 0} # 从起点到各节点的实际代价
parent = {START: None} # 路径回溯
closed = set()
expanded = 0 # 记录扩展的节点数
while open_heap:
f, g, node = heapq.heappop(open_heap)
if node in closed:
continue
closed.add(node)
expanded += 1
# 到达终点
if node == GOAL:
path = reconstruct_path(parent, node)
return len(path) - 1, path, expanded # 步数=节点数-1
# 扩展邻居
for nb in neighbors(*node):
new_g = g + 1 # 每步代价为1
if nb not in g_cost or new_g < g_cost[nb]:
g_cost[nb] = new_g
parent[nb] = node
f_val = new_g + h_func(*nb)
heapq.heappush(open_heap, (f_val, new_g, nb))
return None, [], expanded # 无解
# ------------------------------------------------------------------
# 步骤1:可采纳启发函数——曼哈顿距离
# h₁(n) = |n_row - G_row| + |n_col - G_col|
# 永远不高估剩余代价 → 满足可采纳性 → 保证最优解
# ------------------------------------------------------------------
def h_admissible(r, c):
"""曼哈顿距离:可采纳,不高估"""
return abs(r - GOAL[0]) + abs(c - GOAL[1])
steps1, path1, exp1 = astar(h_admissible, "可采纳A*")
print("=== 步骤1:可采纳启发函数(曼哈顿距离)===")
print(f"路径长度:{steps1} 步")
print(f"扩展节点数:{exp1}")
print(f"路径:{path1}")
# ------------------------------------------------------------------
# 步骤2:不可采纳启发函数——曼哈顿距离 × 2
# h₂(n) = 2 × (|n_row - G_row| + |n_col - G_col|)
# 高估了剩余代价 → 违反可采纳性 → 可能找到次优路径
# ------------------------------------------------------------------
def h_inadmissible(r, c):
"""2倍曼哈顿距离:不可采纳,会高估"""
return 2 * (abs(r - GOAL[0]) + abs(c - GOAL[1]))
steps2, path2, exp2 = astar(h_inadmissible, "不可采纳A*")
print("\n=== 步骤2:不可采纳启发函数(2倍曼哈顿距离)===")
print(f"路径长度:{steps2} 步")
print(f"扩展节点数:{exp2}")
print(f"路径:{path2}")
# ------------------------------------------------------------------
# 对比结论
# ------------------------------------------------------------------
print("\n=== 对比结论 ===")
print(f"可采纳启发函数 → {steps1} 步(最优解保证)")
print(f"不可采纳启发函数 → {steps2} 步({'最优' if steps1==steps2 else '次优,非最优'})")
if steps1 != steps2:
print(f" 差距:{steps2 - steps1} 步(契约被打破,找到了更长的路径)")
print(f"\n注意:可采纳版扩展 {exp1} 个节点,不可采纳版扩展 {exp2} 个节点。")
print(" 不可采纳启发函数扩展更少节点,速度更快,但牺牲了最优性保证。")步骤1:用可采纳启发函数
最简单的可采纳启发函数是曼哈顿距离(Manhattan Distance):
这是”如果没有障碍物,直线走到终点”的代价。因为实际路径必须绕过障碍物,所以
从S开始,计算相邻节点的
| 节点 | g(n) | h₁(n) | f(n) |
|---|---|---|---|
| S右 | 1 | 9 | 10 |
| S下 | 1 | 8 | 9 |
选择
步骤2:用不可采纳启发函数
现在故意违反契约。定义一个高估的启发函数:
这个函数把剩余代价估计为曼哈顿距离的2倍——明显高估了。
重新从S开始:
| 节点 | g(n) | h₂(n) | f(n) |
|---|---|---|---|
| S右 | 1 | 18 | 19 |
| S下 | 1 | 16 | 17 |
看起来”S下”仍然更优。但继续搜索,你会发现:当A*接近真正的最优路径时,因为
结果:A*可能找到一条长度=13的路径,而不是最优的11步。
这就是可采纳性的意义:如果
但可采纳性也有代价。
五、信息论视角:启发函数的熵代价
可采纳性保证了正确性,但代价是什么?
考虑两个极端:
极度保守:
这显然可采纳(因为真实代价
极度激进:
这是理想情况——A*会直接走最优路径,不探索任何无用节点。这相当于零熵搜索:你已经知道答案,不需要探索。但问题是:如果你已经知道
现实中的启发函数在两者之间:尽可能接近
这个权衡可以用有效分支因子(effective branching factor)
其中
Pearl在1984年的经典教材里给出了实验数据:
当
时, (在8-puzzle上) 当
时, 当使用更精确的启发函数(如模式数据库)时,
从2.8降到1.1,意味着搜索树的节点数从
启发函数的质量,直接决定了搜索需要消耗的计算资源。
但这里有一个深层的张力:好的启发函数需要领域知识。曼哈顿距离对网格有效,但对图搜索呢?对连续空间呢?对围棋呢?
在复杂环境中,设计一个既可采纳又接近
这就是[Zixi Li, 2026a]的ADS工作要解决的问题:能否让机器自动学习启发函数?
六、ADS:启发式的信息论化
传统启发式设计有一个根本局限:
但搜索空间是动态的。在开阔区域,启发函数值得信任;在障碍物密集区域,任何启发函数都可能误导。固定权重
[Zixi Li, 2026a] 的 ADS(自适应双搜索)提出了一个问题:能否用信息论量化启发函数的可信程度,让权重随当前状态的不确定性自动调整?
核心思想是将启发函数的权重
- 当模型对当前状态高度确定(低熵)时,
大——信任启发函数,快速前进 - 当模型对当前状态充满不确定(高熵)时,
——形成势垒,拒绝进入高不确定性区域
这不是参数调优,而是将不确定性量化为可操作的搜索约束。A* 的可采纳性保证了"不高估",ADS 的熵障碍保证了"不探索高熵死路"。
与可采纳性的关系:可采纳性是对
ADS 的更完整技术细节,以及它如何被应用于 LLM 推理空间,在第10章展开。
A*的可采纳性保证了最优解,但代价是必须探索所有”可能最优”的路径。在某些问题上,这依然太慢。
1973年,计算复杂性理论迎来了一个转折点。Stephen Cook证明了SAT问题是NP完全的——如果你能在多项式时间内解决它,你就能解决所有NP问题。
这个证明引发了一个深刻的哲学转变:也许我们应该放弃寻找最优解,转而寻找”足够好”的解。
但”足够好”需要一个精确的定义。否则,任何算法都可以声称自己”足够好”。
1974年,David Johnson引入了近似比(approximation ratio)的概念。对于最小化问题,一个α-近似算法保证:
这是一个最坏情况保证——无论输入如何,近似比都不会超过α。
让我用一个经典例子说明。
7.1 顶点覆盖:一个2-近似算法
顶点覆盖问题(Vertex Cover):给定一个图,找到最小的顶点集合,使得图中每条边至少有一个端点在集合中。
这个问题是NP完全的。暴力搜索需要检查
但有一个极其简单的2-近似算法:
import random
def greedy_vertex_cover(edges):
"""
贪心顶点覆盖:2-近似算法,时间复杂度 O(|E|)。
edges: [(u, v), ...] 边列表
返回: 顶点覆盖集合 C,保证 |C| ≤ 2|C*|
"""
remaining = list(edges)
C = set()
while remaining:
u, v = random.choice(remaining) # 随机选一条边
C.add(u)
C.add(v)
# 删除所有与 u 或 v 相连的边
remaining = [(a, b) for a, b in remaining if a not in (u, v) and b not in (u, v)]
return C这个算法的运行时间是
其中
证明(这是近似算法分析的经典技巧):
每次选择的边
我们的算法两个都选了。所以我们选择的顶点数,最多是最优解的2倍。
这个保证是紧的——存在输入使得算法恰好达到2倍。但它是最坏情况的保证:无论输入如何,近似比都不会超过2。
7.2 PTAS:任意接近最优
近似算法的圣杯是PTAS(Polynomial-Time Approximation Scheme)。
PTAS是一族算法,对于任意
换句话说,你可以任意接近最优解——想要99%最优?可以。想要99.9%最优?也可以。代价只是多项式时间的增长。
[Li & Jin, 2015]为加权单位圆盘覆盖问题提供了首个PTAS。这个问题在无线网络设计中有重要应用:给定平面上的点,用最少的单位圆盘覆盖所有点。
他们的算法时间复杂度是
这揭示了PTAS的局限:理论上可行,实践上可能不可行。
近似算法的契约:我不保证给你最优解,但保证给你的解不会太差,而且我能精确告诉你”不会太差”的程度。这是一个诚实的契约——比”我尽力了”要强得多。
八、伪代码:A*与自适应启发权重
让我把前面讨论的核心算法形式化。
算法1:标准A*搜索
import heapq
def astar(graph, start, goal, h):
# graph: dict {node: [(neighbor, cost), ...]}
# h: 启发函数 h(node) -> 估计到终点的代价
# 返回: 最短路径列表,或 None(无解)
open_heap = [(h(start), 0, start, [start])] # (f, g, node, path)
closed = set()
while open_heap:
f, g, node, path = heapq.heappop(open_heap)
if node == goal:
return path
if node in closed:
continue
closed.add(node)
for neighbor, cost in graph.get(node, []):
if neighbor in closed:
continue
g_new = g + cost
heapq.heappush(open_heap, (g_new + h(neighbor), g_new, neighbor, path + [neighbor]))
return None # 无解时间复杂度:
算法2:ADS自适应启发权重
import math
def ads_search(start, goal, cost_fn, h_fn, policy_fn, k=3.0):
# policy_fn(s) -> 动作概率分布 dict {action: prob}
# h_fn(s) -> 启发式估计值(到终点的代价)
# cost_fn(s,a) -> 执行动作 a 的代价
def entropy(probs):
return -sum(p * math.log(p + 1e-10) for p in probs if p > 0)
s, path, g = start, [start], 0.0
while s != goal:
action_probs = policy_fn(s)
actions = list(action_probs.keys())
probs = list(action_probs.values())
U_s = entropy(probs)
H_max = math.log(len(actions) + 1e-10)
# 信息论势垒:熵越接近最大值,不确定性越高,降低对启发式的信任
B_s = U_s / (H_max + 1e-10)
alpha = 1.0 / (1.0 + math.exp(-k * B_s)) # sigmoid
best_action, best_f = None, float("inf")
for action in actions:
f_val = g + cost_fn(s, action) + alpha * h_fn(action)
if f_val < best_f:
best_f, best_action = f_val, action
g += cost_fn(s, best_action)
s = best_action
path.append(s)
return path关键创新:α 不是固定的,而是根据当前状态的信息论特性动态调整。熵高(不确定性大)时降低对启发式的依赖;熵低时信任启发式快速前进。
九、可视化:启发权重如何影响搜索路径
想象一个2D网格世界,有障碍物和目标。不同的启发权重α会导致完全不同的搜索行为。
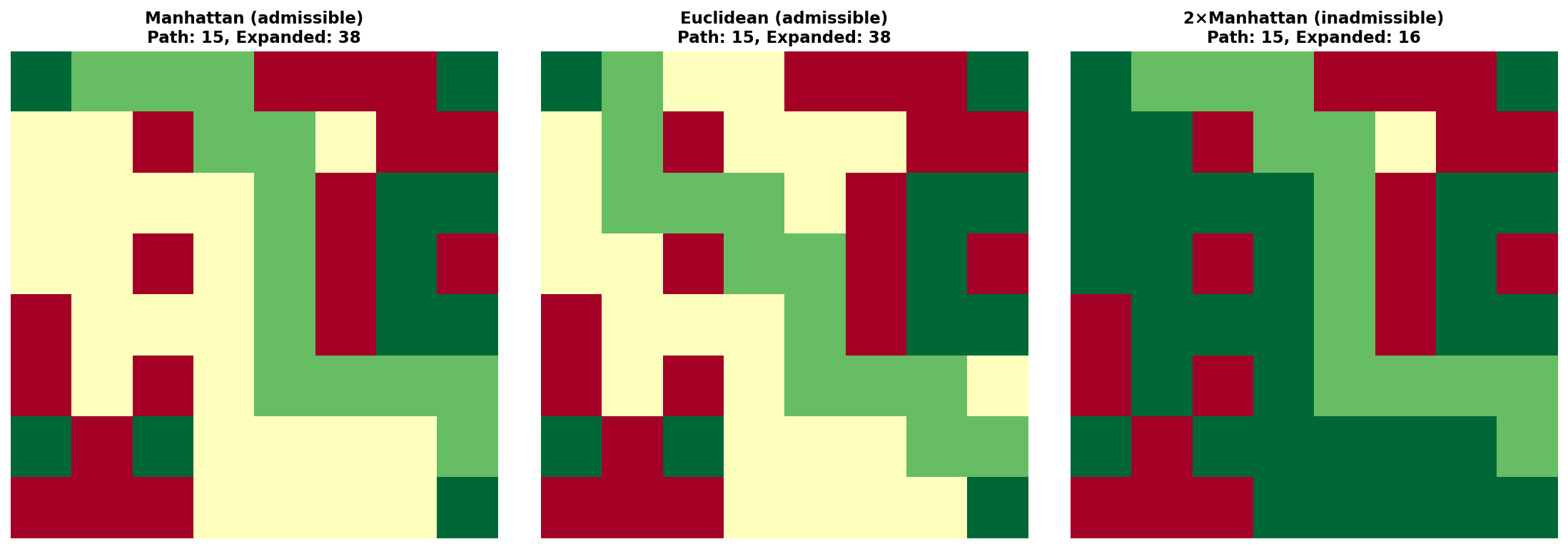 三种启发权重配置的搜索行为:(a) α=0(Dijkstra):均匀扩散,探索所有方向,保证最优但效率低。(b) α=1(标准A):沿启发方向前进,遇到障碍物时适度回溯。(c) α=2(贪心):过度信任启发式,可能陷入局部最优。绿色是起点,红色是终点,蓝色阴影是扩展的节点,黄色线是最终路径。*
三种启发权重配置的搜索行为:(a) α=0(Dijkstra):均匀扩散,探索所有方向,保证最优但效率低。(b) α=1(标准A):沿启发方向前进,遇到障碍物时适度回溯。(c) α=2(贪心):过度信任启发式,可能陷入局部最优。绿色是起点,红色是终点,蓝色阴影是扩展的节点,黄色线是最终路径。*
关键观察: - α太小:搜索过于保守,扩展大量无用节点 - α太大:搜索过于激进,可能错过最优路径 - α=1且h可采纳:平衡点,保证最优且效率高
ADS的创新在于:α不是固定的,而是根据局部地形自适应调整。
这个自适应性来自信息论势垒B(s)的计算: - 在开阔区域:IG高(沿启发方向信息增益大),U低(后续状态确定) → B高 → α高 - 在障碍物附近:IG低(启发方向被阻挡),U高(多个绕行选择) → B低 → α低
十、启发式的哲学:接受不完美的勇气
让我回到本章开头的问题:当完美不可及时,我们应该做什么?
启发式算法的答案是:明确代价地接受近似。
这需要勇气,因为你必须承认完美不可及。但这不是失败,而是智慧。
可采纳性是A*的契约:我可以乐观,但不能撒谎。如果
近似比是近似算法的契约:我不承诺最优,但承诺不会太差。2-近似算法保证解不超过最优解的2倍,这是最坏情况的数学保证——不是平均情况,不是”通常很好”,而是”永远不会超过2倍”。
概率保证是随机化算法的契约:我不保证每次都对,但保证以
这三种契约,对应三种不同的”不完美”:
条件保证:如果假设成立,我保证最优(A*)
最坏情况保证:我保证不会太差,但可能不是最优(近似算法)
概率保证:我大概率正确,但有小概率失败(随机化算法)
相比之下,没有契约的启发式——”我尽力了”、”通常很好”、”在我测试的数据上有效”——是不诚实的近似。它们没有告诉你失败的条件,没有量化”不够好”的程度,没有给出风险的概率。
但启发式也有代价:
设计成本:好的启发函数需要领域知识。曼哈顿距离对网格有效,但对图搜索呢?对连续空间呢?每个新问题都需要重新设计启发函数。
计算成本:复杂的启发函数可能比搜索本身还慢。如果
泛化风险:针对特定问题设计的启发式,换个场景可能失效。这就是为什么ADS用神经网络学习启发策略——它可以跨任务泛化。但代价是失去了数学保证。
这引出了一个深层的张力:可证明的保证 vs 经验的泛化。
A*有可采纳性保证,但需要手工设计
这是第十二章的问题。现在,先记住这个张力。
十一、姚期智原理:算法设计即博弈
在讨论Collins如何突破确定性下界之前,我们需要先理解一个更深层的问题:启发式设计,究竟是在和谁博弈?
1977年,姚期智(Andrew Chi-Chih Yao)在一篇短短几页的论文里,给出了一个改变算法复杂度理论格局的答案。
8.1 把算法设计变成博弈
想象这样一个游戏。
有两个玩家:
- 玩家A(算法设计者):选择一个算法
来解决某个问题 - 玩家B(对手/输入分布):选择一个输入分布
,试图让算法跑得最慢
玩家A先行还是后行?如果A先选算法,B就针对这个算法构造最坏情况输入。如果B先选分布,A就针对这个分布优化算法。
这是一个零和博弈。
8.2 MiniMax定理的两侧
姚期智原理(Yao's Minimax Principle)说的是:在确定性算法和随机性输入之间,存在一个MiniMax等式。
这个等式的左边是:"最优的确定性算法,在最坏情况输入分布下的期望时间"。
这个等式的右边是:"在某个固定输入分布下,最优确定性算法的期望时间"。
两边相等。这意味着:你可以通过分析固定分布下的确定性算法下界,来得到所有随机化算法的下界。
8.3 费曼式讲解:为什么这是深刻的?
让我用一个比喻说清楚。
假设你是一个将军(算法设计者),要制定一个通用战术(算法),面对不同的敌人(输入)。你不知道敌人会怎么部署。
悲观情形(MaxMin):你先选战术,然后敌人选对你最不利的部署。
- 你的最优战术 = "在最坏敌人部署下,我能做到最好的结果"
乐观情形(MinMax):敌人先选分布,然后你选最好的战术。
- 你的最优战术 = "在已知敌人的平均部署统计下,我能做到的最好结果"
MiniMax定理说:这两个值相等。
这意味着什么?
确定性算法的最坏情况下界 = 随机化算法的平均情况下界。
更直白地说:如果你想证明"任何确定性算法都至少需要
这是一个极其有力的工具——你把"最坏情况"分析转化为了"平均情况"分析,而后者通常更容易处理。
8.4 启发式设计的博弈论视角
现在把这个框架应用到启发式设计上。
启发式函数
| 玩家 | 选择 | 目标 |
|---|---|---|
| 启发式设计者 | 启发函数 | 最小化搜索时间 |
| 问题实例生成器 | 输入图/迷宫的分布 | 最大化搜索时间 |
姚期智原理告诉我们:无论多么聪明的确定性启发式,都有一个由输入分布决定的性能下界。
这个下界不是工程限制,而是信息论限制:如果你的启发式函数是确定性的,对手(输入分布)总能找到一类问题,让你的性能退化到最坏情况。
8.5 从相对下界到绝对下界
这里出现了一个关键区分:
相对下界(Relative Lower Bound):
- "对于确定性启发式
,存在输入使得搜索时间是 " - 这是相对于特定算法的下界——换一个算法,下界可能不同
绝对下界(Absolute Lower Bound):
- "对于任何确定性算法,搜索时间都是
" - 这是关于问题本身的下界——没有任何确定性算法能突破它
姚期智原理建立了两者之间的桥梁:通过博弈论的MiniMax等式,你可以把特定算法的最坏情况下界,提升为对所有确定性算法都成立的绝对下界。
但这里有一个陷阱:这个绝对下界,只对确定性算法成立。
随机化算法不受同样的约束。
为什么?因为随机化算法打破了博弈的对称性:对手无法针对一个随机算法构造最坏情况输入——因为随机算法每次运行都不同,对手不知道该如何"针对"它。
这就引出了Collins的核心思想。
十二、Collins:用随机化突破确定性下界
启发式通常是确定性的:给定状态s,h(s)总是返回同一个值。但[Zixi Li, 2026b]的Collins工作表明,随机化可以突破确定性的信息论下界。
Collins针对的是优化器状态压缩问题,但其核心思想揭示了启发式设计的一个深层原理。
8.1 确定性的信息论下界
Proposition 1(确定性下界):任何确定性数据结构,维护d个参数的精度ε状态,必须使用
这不是工程限制,这是信息论的计数论证:
要区分
这意味着:如果你想用确定性方法存储Adam优化器的一阶和二阶矩(对于d个参数),你至少需要
对于大型语言模型(d可能是数十亿),这是一个巨大的瓶颈。
8.2 随机化的突破:用概率换空间
Collins用Count-Sketch + 2-Universal Hashing,将状态复杂度从
关键思想:不存储精确状态,而是存储状态的随机投影。
这类似于物理学中的粗粒化(coarse-graining):你不追踪每个粒子的精确位置,而是追踪宏观统计量。代价是引入噪声,但如果噪声足够小,宏观行为依然正确。
Chernoff不等式给出了安全上界:
其中
实验验证了理论预测:
8.3 对启发式的启示:确定性vs概率保证
Collins的工作揭示了启发式设计的一个深层权衡:
确定性启发式:保证对于给定输入,总是返回相同的估计。但受信息论下界约束——好的启发函数需要存储大量领域知识。
随机化启发式:用概率保证换取更低的计算/存储成本。不保证每次都正确,但保证”高概率正确”。
这是另一种契约——从”保证正确”到”以
从物理学角度看,这是热力学第二定律的体现:你可以用熵(随机性)换取能量(计算资源)。确定性系统需要维持低熵状态,代价是高能量消耗。随机化系统允许更高的熵,因此能量消耗更低。
Landauer原理给出了理论下界:擦除1比特信息至少需要
启发式是在已知结构上做近似。下一章,我们将看到 Transformer 如何通过动态连接所有节点,彻底重构了"结构"的概念。
悬而未决
启发函数的”好坏”能否被形式化定义?
什么样的
在理论上最优?Pearl证明了一致性(consistency)强于可采纳性,但这是最强的有用条件吗?是否存在”最接近 的可采纳函数”?这个问题等价于:给定有限的计算资源,如何最优地分配给启发函数的设计? 熵障碍的适用边界在哪里?
ADS的动态对数障碍在算术任务上有效,但在抽象代数上失败。这个失败是原则性的还是工程性的?换句话说:是熵正则化本身不适合高阶抽象,还是只是360M模型太小?如果给3B模型,抽象代数任务会成功吗?这个问题触及熵作为推理约束的根本限制。
神经网络学到的隐式启发式与人工设计的显式启发式有何本质区别?
AlphaGo的价值网络是一种启发函数,但它不满足可采纳性——为什么仍然有效?一个可能的答案是:神经网络学到的是平均情况的启发式,而可采纳性是最坏情况的保证。但这意味着什么?是否存在”平均情况可采纳性”的概念?
随机化启发式的理论边界在哪里?
Collins证明了确定性下界
,但随机化的上界是什么?Chernoff界给出了 ,但这是紧的吗?是否存在”最优随机化启发式”——在给定失败概率 下,最小化计算成本? 启发式能否在线学习?
经典启发式是离线设计的——在搜索开始前就固定了。但能否设计一个启发函数,在搜索过程中学习并调整自己?每次扩展节点,都更新对
的估计,使得后续搜索更高效?这类似强化学习,但目标是加速当前搜索,而不是泛化到未来任务。 近似算法的下界在哪里?
我们知道顶点覆盖有2-近似算法,但能否做到1.5-近似?1.1-近似?对于某些NP完全问题,存在近似下界——除非P=NP,否则不存在
-近似算法。这些下界告诉我们:有些问题,近似也是困难的。
延伸阅读
Hart, Nilsson, Raphael (1968). A Formal Basis for the Heuristic Determination of Minimum Cost Paths — A*算法原始论文,定义了可采纳性和一致性
Yao, A. C.-C. (1977). Probabilistic Computations: Toward a Unified Measure of Complexity — 姚期智原理原始论文,MiniMax定理将确定性下界提升为随机化下界
→ [FOCS 1977][Zixi Li, 2026a] — ADS自适应双搜索,启发式的信息论化,知识蒸馏框架
[Zixi Li, 2026b] — Collins随机化优化器,确定性下界与Chernoff上界,
的相变 [Li & Jin, 2015] — 加权单位圆盘覆盖的PTAS,近似算法的黄金标准
→ [arXiv:1502.04918][Esmer et al., 2022] — 近似单调局部搜索的指数时间近似算法
→ [arXiv:2206.13481]Pearl, J. (1984). Heuristics: Intelligent Search Strategies for Computer Problem Solving — 启发式搜索的经典教材
Motwani, R. & Raghavan, P. (1995). Randomized Algorithms — 剑桥大学出版社出版的随机化算法权威教材,系统讲述Chernoff界、2-Universal哈希、MiniMax原理及其在算法设计中的应用
Russell & Norvig (2020). Artificial Intelligence: A Modern Approach (4th ed.) — 第3-4章详细讨论A*及其变体