5.2 图像分割:U-Net 及其变体
开场问题
这一节回答的是:怎样让模型不仅知道“有没有病”,还知道“病灶或器官到底在哪儿、边界到哪里”。
读者通常会在这些场景里感到分类不够用:
- 肿瘤体积要怎么量;
- 肺野边界到底落在哪一圈像素;
- 放疗靶区要勾到哪一层切片结束;
- 手术规划时器官和病灶的空间关系怎么描述。
这些问题都说明,临床并不总满足于一个总标签,它往往还需要像素级或体素级定位。
直觉解释
分割可以先不理解成“复杂网络”,而理解成:把影像读片结果变成可测量区域。
分类只回答“有没有”“像不像”;分割则进一步回答:
- 这块区域在哪里;
- 面积有多大;
- 体积是多少;
- 边界和周围结构怎么接触。
U-Net 之所以经典,也不是因为它“层数很多”,而是它抓住了一个核心矛盾:
- 深层特征更擅长判断“这是什么”;
- 浅层特征更擅长保留“它在哪儿”。
于是它一边往下提取语义,一边在上采样时把浅层细节接回来。
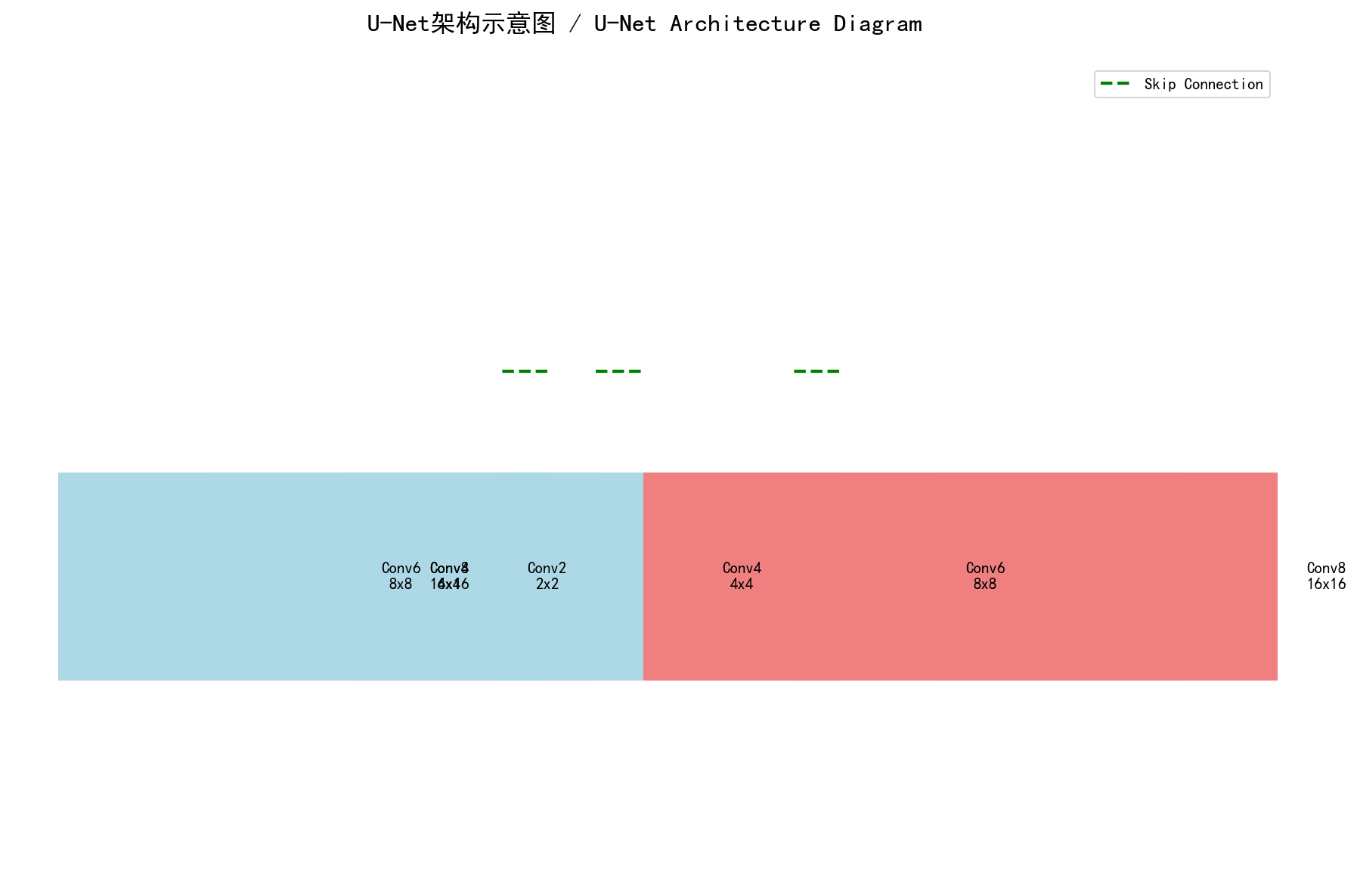 图:U-Net 的关键不是单纯下采样和上采样,而是通过跳跃连接把边界细节重新接回来。
图:U-Net 的关键不是单纯下采样和上采样,而是通过跳跃连接把边界细节重新接回来。
核心方法
这一节先抓住 4 个关键点。
1. 明确分割输出是什么
分割输出通常不是一个总分,而是一张与输入同尺度或可映射回原图尺度的概率图或掩膜。
2. 同时保留语义与边界
编码器负责抽取更高层的语义;解码器负责恢复空间分辨率;跳跃连接保证小结构和边界不会在下采样过程中完全丢掉。
3. 让标签和图像严格对齐
对分割任务来说,最怕的不是“增强不够多”,而是 image 和 mask 变换不同步。一旦错位,模型学到的就不再是真正边界。
4. 评估不能只看损失下降
Dice、IoU、敏感性、连通域表现、后处理效果,往往比单纯的训练 loss 更接近实际任务质量。
典型案例
场景 1:肺野分割
- 目标:从胸部 CT 中得到肺部区域掩膜。
- 价值:为后续结节检测、感染分析、定量测量提供 ROI。
- 本地源码:
src/ch05/lung_segmentation_network/main.py。
场景 2:器官或肿瘤分割
- 目标:肝脏、胰腺、脑肿瘤、前列腺等精确轮廓。
- 价值:体积估计、病灶负荷监测、放疗靶区勾画。
- 延伸方向:2D U-Net、3D U-Net、Attention U-Net、nnU-Net。
场景 3:分割任务中的数据增强
- 目标:让 image 与 mask 在同一几何变换下同步变化。
- 本地源码:
src/ch05/medical_segmentation_augmentation/main.py。 - 提醒:增强图像时,标签也必须同步变换。
实践提示
正文只保留帮助理解结构的关键片段;完整训练、评估与可视化请看 src/ch05/。
1. 一个最小的卷积块
python
import torch.nn as nn
def double_conv(in_channels, out_channels):
return nn.Sequential(
nn.Conv2d(in_channels, out_channels, 3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels, 3, padding=1),
nn.ReLU(inplace=True),
)2. 跳跃连接的关键动作:拼接
python
import torch
def fuse_skip(upsampled, shallow_feature):
return torch.cat([upsampled, shallow_feature], dim=1)3. Dice 的最小实现
python
import torch
def dice_score(pred_mask, true_mask, eps=1e-6):
inter = (pred_mask * true_mask).sum()
union = pred_mask.sum() + true_mask.sum()
return (2 * inter + eps) / (union + eps)4. 分割项目里最容易忽略的检查
- image / mask 是否一一对应;
- 预处理后标签是否还和原图对齐;
- 小病灶是否在缩放时被抹掉;
- 后处理是否错误删掉了真实病灶。
小结
这一节学会了:分割的价值在于把“看见病灶”变成“圈出范围并可测量”,而 U-Net 的直觉核心是同时保留语义和边界。
当你能把“输入、输出、评估”三件事串起来时,U-Net 就不再只是结构图,而会变成一个真正可操作的分割工作流。
代码实验 / 实践附录
运行命令、环境依赖、完整输出和可运行 demo 已统一迁移到 5.6 代码实验 / 实践附录 与 src/ch05/README.md。