5.3 分类和检测
开场问题
这一节回答的是:当我们不需要逐像素勾轮廓时,如何回答“有没有病”“是什么病”“大概在什么位置”。
读者在实际任务里常会遇到这样的痛点:
- 胸片初筛只想先判断是否异常;
- 急诊分诊更在意高召回,而不是先做精细勾画;
- 大规模体检需要先快速分流,再把可疑病例交给医生或后续模型。
也就是说,并不是每个问题都要直接上分割。很多临床 AI 工作流里,分类与检测才是第一道门。
直觉解释
可以把这一节先理解成三种不同层次的问题:
- 分类回答“有没有/是什么”;
- 检测回答“在哪里”;
- 分割回答“边界到哪里”。
分类模型关注的是整张图像里与诊断相关的模式,检测则是在分类的基础上,再学会给出一个粗定位。
医学场景里的难点不只是模型结构,还包括:
- 阳性比例远低于阴性;
- 小病灶在整张图里占比很低;
- 医生不能只接受一个分数,还要追问模型为什么这样判断。
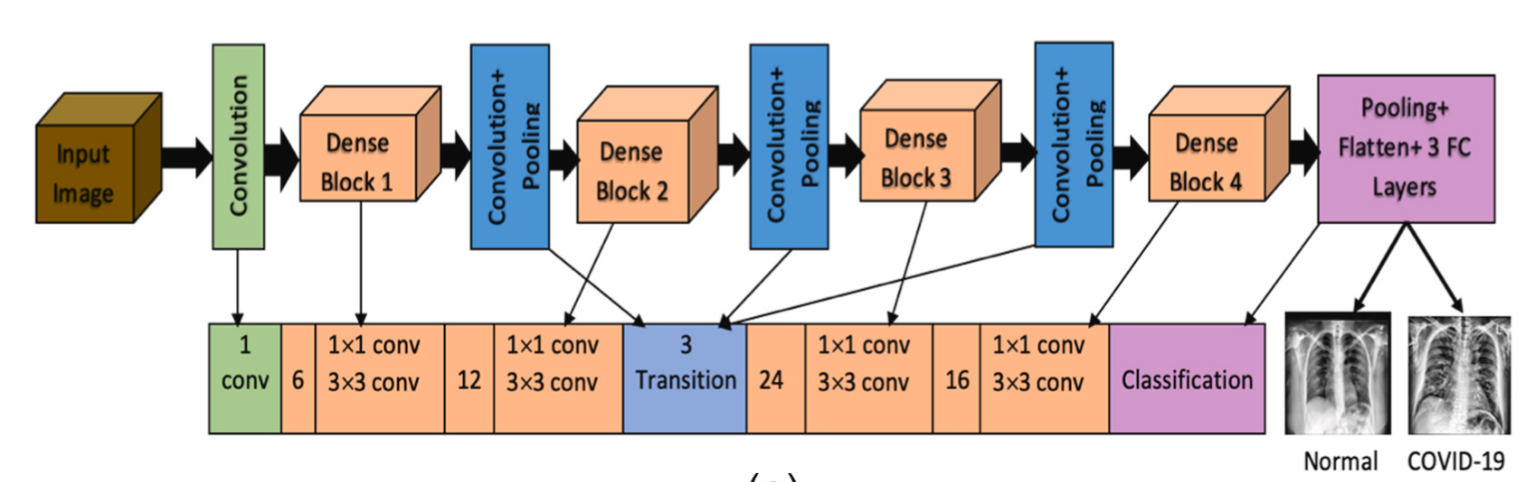 图:分类任务更强调整图诊断模式;检测则进一步把可疑区域显式定位出来。
图:分类任务更强调整图诊断模式;检测则进一步把可疑区域显式定位出来。
核心方法
这一节只抓住 4 个关键点。
1. 先判断任务到底要全图标签还是候选位置
如果目标是筛查、分流、初步告警,分类通常就够用;如果后续需要医生快速复核病灶位置,检测会更合适。
2. 把高召回放在前面
医学任务里,特别是筛查场景,往往宁可多报一些可疑样本,也不能轻易漏掉严重病灶。
3. 认真处理类别不平衡
阳性样本少是常态。重采样、加权损失、阈值调整,往往比单纯换 backbone 更先影响结果。
4. 让输出可解释、可复核
概率、热力图、混淆矩阵、ROC/AUC、错例分析,都是医生判断模型是否可靠的重要依据。
典型案例
场景 1:胸部 X 光二分类或多标签分类
- 目标:正常/异常、肺炎、积液、结节等标签预测。
- 难点:阳性比例低,而且很多异常区域很小。
- 本地源码:
src/ch05/medical_image_classification/main.py。
场景 2:病灶检测作为分诊入口
- 目标:给出候选病灶框,供医生或后续分割模型复核。
- 适合:肺结节、乳腺钙化、骨折可疑点等。
- 本节重点:先建立分类直觉,再理解检测为何需要额外学习位置。
场景 3:模型解释与错误分析
- 目标:不仅看总体分数,还要知道模型到底看到了哪里。
- 建议输出:预测概率、混淆矩阵、ROC/AUC、热力图或注意力图。
- 本地结果文件:
src/ch05/medical_image_classification/output/medical_classification_report.json。
实践提示
正文只保留帮助理解的关键片段;完整网络、训练循环和结果可视化请看本地脚本。
1. 最小分类头
python
import torch.nn as nn
def classification_head(in_features, num_classes):
return nn.Sequential(
nn.Linear(in_features, 256),
nn.ReLU(inplace=True),
nn.Dropout(0.5),
nn.Linear(256, num_classes),
)2. 类别不平衡时的加权交叉熵
python
import torch
import torch.nn.functional as F
def weighted_ce(logits, targets, class_weights):
return F.cross_entropy(logits, targets, weight=torch.tensor(class_weights))3. 从 logits 到可读概率
python
import torch
def to_probabilities(logits):
return torch.softmax(logits, dim=1)4. 做分类/检测时优先补上的检查
- 不要只看 accuracy,同时看 recall、precision、F1、AUC;
- 单独分析假阳性和假阴性;
- 检查热力图是否真的落在病灶附近;
- 明确分类模型和检测模型在临床流程中的分工。
小结
这一节学会了:分类和检测的作用,是在不追求精细轮廓时,先完成筛查、分流和粗定位。
理解了这一节之后,你会更容易判断:某个任务到底应该先做分类、直接做检测,还是需要再走到分割那一步。
代码实验 / 实践附录
运行命令、环境依赖、完整输出和可运行 demo 已统一迁移到 5.6 代码实验 / 实践附录 与 src/ch05/README.md。