
Part A:观测编码
为什么要压缩?
想象一个 64×64 的 RGB 游戏截图,它包含 64 × 64 × 3 = 12,288 个像素值。如果我们直接用这些像素来训练策略网络或动力学模型,会面临三个问题:
- 维度灾难:高维输入让学习变得极其低效,需要海量样本。
- 冗余信息:大多数像素(背景、纹理细节)对决策无关紧要。
- 计算代价:每一步都处理万级维度的输入,速度极慢。
解决方案:把原始观测
编码器把冗余的高维像素空间(12,288 维)压缩为紧凑、可操作的潜在空间(32 维),让后续的动力学模型只需要处理语义信息。
VAE 直觉:学会压缩与重建
变分自编码器(VAE,Variational Autoencoder)[1] 是实现这种压缩的核心工具。它由两部分组成:
- 编码器(Encoder):将图像
映射到潜在空间,输出一个分布的均值 (mu,分布的中心位置)和标准差 (sigma,分布的宽度),然后采样得到 。 - 解码器(Decoder):从潜在向量
重建原始图像 (hat 符号表示"模型的估计值",区别于真实值 )。
关键特性:潜在空间是连续的。这意味着相邻的
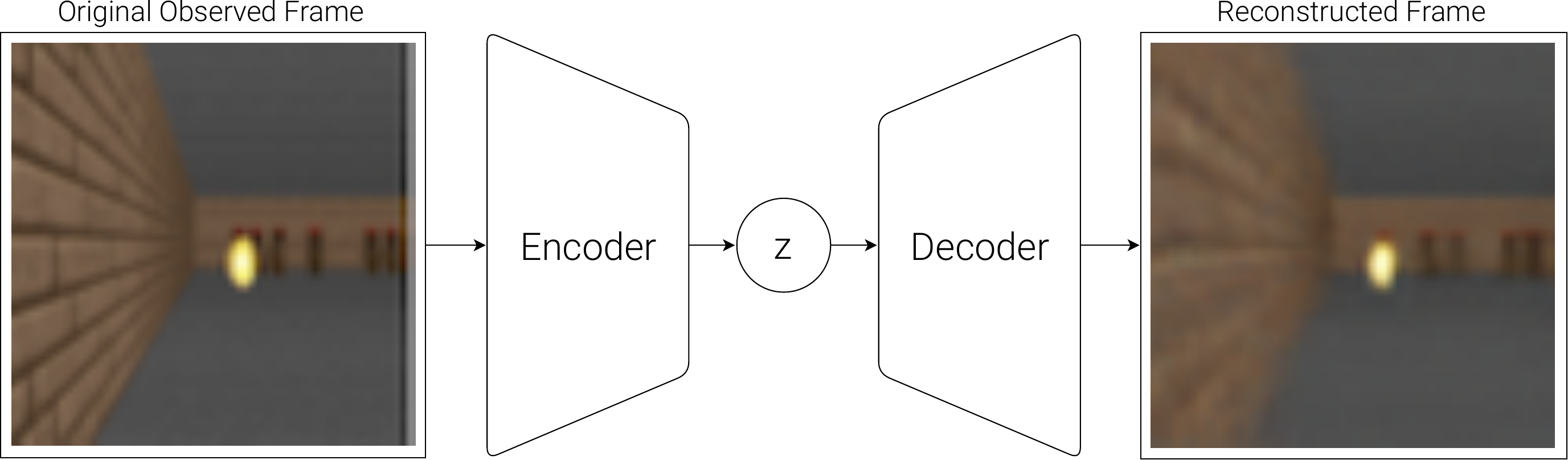
数据沿单一方向流动:CNN 编码器将原始图像压缩为潜在向量 z,CNN 解码器再从 z 重建图像。
📖 转置卷积(Transposed Convolution,也称反卷积):普通卷积将大特征图压缩为小特征图(降低空间分辨率);转置卷积做相反的操作,将小特征图放大为大特征图(提升空间分辨率)。解码器用转置卷积逐步将低维潜在向量"还原"回原始图像尺寸。
ELBO 损失:两个目标的平衡
VAE 的训练目标是ELBO(证据下界,Evidence Lower Bound),包含两项:
📖 什么是 ELBO? 我们真正想最大化的是"模型生成真实图像的概率"
,但这个量直接计算很困难(需要对所有可能的 积分)。ELBO 是它的一个可计算下界,最大化 ELBO 等价于在约束下尽量接近这个目标。名字里的"下界"正是这个意思: 。训练时通常把负 ELBO 当作损失函数 来最小化:
📖 什么是 KL 散度?
衡量两个概率分布之间的"差距": 与 越相似,KL 值越接近 0;差距越大,KL 值越大(永远 ≥ 0)。这里用它来约束编码器输出的分布 不要偏离标准正态分布 太远,使得潜在空间的不同区域之间可以平滑插值,而不会出现"空洞"(插值出来的点解码后是乱码)。
| 损失项 | 目标 | 直觉 |
|---|---|---|
| 重建损失 | 解码后的图像要像原图 | "压缩后还能还原" |
| KL 散度 | 潜在分布要接近标准正态 | "潜在空间要整齐、连续" |
两项共同作用:重建损失让
📖 重参数化技巧(Reparameterization Trick):编码器输出均值
和标准差 后,需要从分布 中采样 。直接采样的问题是:采样操作本身不可微,梯度无法从 流回 和 ,编码器就无法被训练。解决方法是把采样改写为: ,其中 是独立采样的噪声(与网络参数无关)。现在 对 和 是可微的,梯度可以正常流过,编码器可以被端到端训练。
CNN 编码器结构
实践中,编码器使用卷积神经网络(CNN) 来处理图像,原因是 CNN 天然擅长捕捉局部空间特征:
- 多层卷积:每层提取更高级的特征(边缘 → 纹理 → 形状 → 语义)
- 步幅卷积(stride convolution):逐步降低空间分辨率,压缩信息
- 全连接层:将最终特征图展平,输出
和 两个向量
典型结构:64×64×3 → Conv(4×4, s=2) → Conv(4×4, s=2) → Conv(4×4, s=2) → Flatten → Linear → (
动手感受:VAE 可视化
打开项目中的 demos/vae-visualizer.html,你可以:
- 加载一张预训练好的 VAE
- 用滑块调节潜在向量
的各个维度 - 实时观察解码器输出的图像如何变化
观察要点:某些维度控制颜色,某些控制位置,某些控制形状,这就是潜在空间学到的语义解耦(disentanglement,指潜在向量的不同维度各自独立控制一个可解释的语义因素,调节一个维度只影响对应的属性而不影响其他属性)。