Chapter 12: Implicit Reasoning: The Neural Network's Internal Monologue
Before the model outputs its first token, what has it done?
1. Thinking Inside the Black Box
In 2022, Wei et al. discovered a surprising phenomenon: if large language models are asked to "speak their reasoning process" before giving an answer, their accuracy significantly improves.
This is Chain-of-Thought (CoT).
Chain-of-Thought (CoT): Why does "speaking the steps" make the model smarter? (Prior work: Wei et al., 2022)
Chain-of-Thought (CoT) prompting is a technique discovered by Wei et al. of Google Brain in 2022: adding "Let's think step by step" after the question, or demonstrating reasoning steps in few-shot examples, greatly improves the model's accuracy on complex reasoning.
Why is it effective? The mainstream explanations are:
- Increased computational budget: Generating each token consumes one step of computation. Having the model write out intermediate steps gives it more "thinking space" — just like having you work out calculations on scratch paper rather than requiring you to do mental arithmetic.
- Intermediate outputs become new inputs: Each step generated by the model is concatenated into the context, becoming the input for the next step. This decomposes a complex problem into multiple simpler sub-problems.
Important limitation: CoT is almost ineffective for small models, only emerging at around 100B+ parameters. This suggests it depends on some underlying capability that only appears in large models.
This phenomenon leaves a lingering question at the heart of this chapter: is the model actually "reasoning" or is it "format matching"?
For example, the question: "Roger has 5 tennis balls. He buys 2 more cans of tennis balls, each can has 3 balls. How many balls does he have now?"
Direct answer:
Model output: 11 balls
Accuracy: 17%
CoT prompt: "Let's think step by step"
Model output:
Roger originally had 5 balls.
He bought 2 cans, each with 3 balls, so 2×3=6 balls.
Total is 5+6=11 balls.
Answer: 11 balls
Accuracy: 78%
Accuracy jumps from 17% to 78%. This improvement does not come from more parameters or more training data, but from having the model explicitly output intermediate steps.
This raises a profound question: Before the model "speaks" the reasoning process, what is happening inside it?
Pause for a moment
17% to 78%. The very act of speaking the reasoning steps is changing the computational result.
But wait — the same model, the same weights, the same parameter count. The only thing that changed is: it was asked to write out the intermediate steps.
What does this mean?
One interpretation is: the model's capability was always there, CoT merely "unlocks" it — giving it the opportunity to use more computational steps.
Another interpretation is: the model is not reasoning at all, it is merely matching the "format of reasoning steps" — when it generates the sentence "Roger originally had 5 balls," this intermediate output becomes the input for the next step, transforming the problem into a form more amenable to statistical pattern matching.
These two interpretations make the same predictions in most cases, but their judgments about the model's essence are diametrically opposed.
Which one do you think is right? More importantly: is there an experiment that can distinguish them?
Set this question aside for now.
2. Hidden Layers: The Darkroom of Reasoning
The forward pass of a neural network is a layer-by-layer transformation process:
Each layer
What are these hidden layers doing?
One intuition is: shallow layers extract low-level features (edges, textures), deep layers extract high-level features (objects, concepts). But in reasoning tasks, the role of hidden layers is more subtle.
In 2022, Olsson et al. studied the induction heads of GPT models — certain attention heads specialized in "seeing a pattern and predicting the next."
For example, input sequence: "A B C A B ?"
The induction head notices the "A B" pattern repeats and predicts the next is "C".
This indicates: hidden layers are maintaining some kind of "working memory" structure — they remember previous patterns and use this memory to infer the future.
But how deep is this "working memory"? How complex a reasoning can it support?
3. What Really Happens in the Hidden Layers
At this point, we can formulate the question more precisely.
The reason CoT is effective is not necessarily because the model suddenly learns new logical rules; more likely, it is because it spreads out the internal computation originally compressed into a single forward pass across a sequence of writable intermediate states. In other words, the explicit reasoning chain is only the surface; what really happens first is the state evolution within the hidden layers.
This is the core question this chapter pursues: before the answer is spoken, how much work have the hidden layers already done?
The most natural intuition is: the forward pass of a neural network is itself a kind of internal monologue unfurled layer by layer. The input does not turn into the answer all at once; it first becomes some intermediate representation, is then reorganized, compressed, amplified, and only finally projected into the output space. Written as a formula:
Here, each layer
In perceptual tasks, we often say shallow layers recognize edges and deep layers recognize objects. But in reasoning tasks, this layering is more like something else: shallow layers first rewrite the problem into a coordinate system the model can process more easily, and deep layers then perform relational integration within this coordinate system.
This is also why the 2022 study by Olsson et al. on GPT was so important. They found that certain attention heads specifically perform an operation approximating "working memory": after seeing a pattern, they keep tracking the continuation of that pattern. For example, when the input sequence is "A B C A B ?", the induction heads in the model align the earlier "A B" with the later "A B", and thus predict the next token is "C".
The significance of this is not "the model can complete sequences" — that is too shallow. What really matters is: hidden layers are not static feature warehouses; they are maintaining some kind of manipulable internal state. They retain local relations, align distant fragments, and bring previously seen structures to the current moment to continue computation. This is already very close to what we usually call "intermediate reasoning."
So the real question to ask here is not "does the model have thoughts," but: how far can this internal state evolution go?
Can it support genuine multi-step reasoning? Can it maintain consistency when the chain is long enough? Can it, without relying on explicit output steps, complete some stable logical propagation internally?
The Yonglin Formula, coming later, will give a not-so-optimistic answer: it can go a certain distance, but not infinitely far; it can advance at the object level, but cannot self-verify at the meta level; it can form a brief reasoning window, but will ultimately be pulled back by the prior anchor.
So, to understand CoT as "the model learned to speak its thoughts out loud" is not enough. A more precise formulation is: CoT temporarily extends the effective length of the hidden layers' internal monologue.
This brings us to the next step: if the hidden layers are indeed unfolding an internal monologue, then as the reasoning chain continues to lengthen, where will this monologue begin to distort?
4. CoT: Making Implicit Reasoning Explicit
What is the role of CoT? One interpretation is: CoT forces the model to make implicit reasoning explicit.
Normally, the model's reasoning happens in the hidden layers — a single forward pass from input to output. But this process is "compressed," with all reasoning steps crammed into limited hidden layers.
CoT, by generating intermediate tokens, gives the model more "computation time":
- Each token generated requires a full forward pass
- Generating a 10-token reasoning chain is equivalent to 10 forward passes
- This gives the model 10× the computational depth
This resembles human "slow thinking" — when a problem is complex, we don't immediately give an answer, but write down intermediate steps on paper, advancing step by step.
But CoT has a subtle problem: is it really reasoning, or is it performing reasoning?
5. The Yonglin Formula: Where Does the Prior Come From?
The research of [Zixi Li, 2025b] reveals a fundamental limitation of CoT: no matter how long the reasoning chain, it will eventually converge back to the prior anchor.
This is the Yonglin Formula:
Before understanding this formula, we need to clarify three concepts: what
Where does the prior anchor
The prior anchor is not something mysterious; it is the statistical bias of the training data.
Imagine you are training a model, and the dataset has 50% positive examples (chain intact, answer is "yes") and 50% negative examples (chain broken, answer is "no").
Under this statistical structure of the training set, the model learns a "default tendency": if I don't know how to answer, I'll guess 50%/50%.
This "default tendency" is the prior anchor
More precisely:
If the training set is 60% positive examples,
The prior anchor is the statistical prejudice "absorbed" by the model from the data. It is not an error; it is the model's optimal guess of the "average state of the world."
What is the reasoning distribution
: the model has not yet started reasoning; the distribution at this point is the prior : the model has seen the first piece of evidence and updated the distribution : the model has processed 10 reasoning steps : the limit after infinite reasoning
What the Yonglin Formula says is: even if you let the model reason for infinitely many steps, its distribution will eventually converge back to
What is
If the chain is complete (A>B>C>...>Z all hold), then the answer to "A>Z?" is 100% deterministically "yes." So
But the model's reasoning limit
This is the meaning of
6. Feynman-Style Explanation: What Are the Object Level and Meta Level?
Now we come to the most central concept: why is convergence inevitable?
The answer is: the object level is closed; the meta level is broken.
These two terms sound philosophical, but they have very concrete meanings.
First, an analogy
Imagine you are doing a math problem: proving "all even numbers can be written as the sum of two primes" (Goldbach's conjecture).
You take out a piece of paper and start listing:
- 4 = 2 + 2 ✓
- 6 = 3 + 3 ✓
- 8 = 3 + 5 ✓
- 10 = 3 + 7 ✓
- ...
- 100 = 3 + 97 ✓
You verified 100 even numbers, and all of them hold. Your object-level activity (verifying specific numbers) is successful and self-consistent.
But you cannot, from these verifications, prove that all even numbers satisfy the condition. Your meta-level activity (judging "can this method prove a universal law") has failed — your paper records cannot let you jump to the conclusion that "all cases hold."
Object level: the concrete calculations you do on paper. Meta level: your judgment about "whether these calculations can prove a universal law."
What is the object level?
The object level is the reasoning task the model is actually executing.
In the 32-hop reasoning task (A>B, B>C, ..., Y>Z, asking A>Z?), the object level is:
- Processing the information "A>B"
- Processing the information "B>C"
- ...gradually transmitting the relationship
The model can operate self-consistently at the object level. It can gradually integrate information, and confidence does indeed rise (from 0.5 to 0.95).
"Object level is closed" means: at this level, the model's reasoning forms a closed loop; it can complete the task "internally."
What is the meta level?
The meta level is the model's reflection and verification of its own reasoning process.
The questions asked at the meta level are not "A>Z?" but:
- "My reasoning just now — is it reliable?"
- "I have processed 32 steps — can I trust the conclusion of these 32 steps?"
- "My confidence of 0.95 — does it truly reflect the chain's completeness, or is it just the statistical bias of the training data?"
The model cannot truly answer meta-level questions.
Why? Because the model does not have a "verifier" independent of itself. The model has only one set of parameters — the same set of parameters is responsible for both reasoning and "verifying whether the reasoning is correct." This is like asking a student to use the same body of knowledge to both solve problems and grade themselves — when the problem exceeds their knowledge scope, their "grading" conclusion and their "solving" answer will err in the same way.
"Meta level is broken" means: when the reasoning chain grows long, exceeding the range the model can effectively track, the model loses the ability to verify reasoning at the meta level. It cannot judge "are my current reasoning steps still valid?"
Why does meta-level rupture lead to convergence?
When the model cannot verify reasoning at the meta level, what should it do?
It can only fall back to its safest answer: the statistical bias of the training set,
This is not "giving up thinking," but rational degradation: when uncertainty cannot be eliminated, the optimal strategy is to fall back to the prior probability.
In Bayesian language:
When the model cannot evaluate
This is the mechanism of convergence: it's not that the model is "tired" or "lazy," but that after meta-level verification fails, Bayesian updating cannot proceed, leaving only the prior.
Hopfield Perspective: Convergence Is the Inevitability of Energy Minimization
But the Bayesian description still falls one step short — it tells us where convergence goes, but not why it is inevitable.
Pallas's Cat Goes Fishing
Imagine Professor Pallas's Cat sitting by a peculiar lake fishing.
This lake is called Integral Lake. Its special feature is: every piece of information flowing into the lake does not disappear, but settles down, mixing with all previous information. Each step of the reasoning chain is pouring a new bucket of information into the lake. This is the intuition of prefix summation (CUMSUM) — what the lake stores is the integral state of all historical information.
The fish Pallas's Cat wants to catch is a specific state — for example, the fish "does A>Z hold?"
The fishing tool is a special fishing rod: the disentanglement operator. This rod can, from the murky integral lake, use softmax weighting to "fish out" the most relevant information — this is exactly what the attention mechanism does: using query vectors (Query) on key-value pairs (Key-Value) in the integral state, softmax-weighted to extract the target information.
In the first few steps, the lake water is still relatively clear. The information is still fresh, the signal still strong. Pallas's Cat can precisely catch the desired fish — confidence rises from 0.5 to 0.95.
But as the reasoning chain lengthens, more and more information pours into the lake, and the water grows murkier. More importantly: there is an undercurrent at the bottom of the lake — the statistical bias of the training data,
When the lake water becomes murky enough, the signal of fresh information is drowned out, and the undercurrent begins to dominate. Pallas's Cat's fishing rod can no longer precisely locate the target fish, but is instead carried along by the undercurrent — what gets caught increasingly resembles the "average state of the lake bottom," namely the prior anchor
This is the intuition of "the more you fish, the deeper you go, the more you are pulled along by the attractor."
The Chapter 9 extra chapter revealed an older thread: self-attention is mathematically equivalent to one retrieval step of a modern Hopfield network. And the core property of Hopfield networks is monotonic descent of the energy function — each update step pushes the state toward an energy minimum, until reaching a fixed point.
Transplanting this perspective to CoT reasoning:
- Each reasoning step is the model performing one associative retrieval — from the context "memory bank," softmax-weighted extraction of the most relevant information
- This retrieval process has an implicit energy function, whose minima correspond to the model's "most stable" states
- The statistical bias of the training data,
, happens to be the global minimum of this energy function
Why
So the convergence described by the Yonglin Formula is not merely the passive degradation of failed Bayesian updating — it is the active attraction of energy minimization: the longer the reasoning chain, the deeper the model enters its own associative retrieval loop, the closer it gets to the attractor, and ultimately it is pulled into the energy well of
Hands-On Experience: Attractors in Hopfield-Style Retrieval
The following code requires no deep learning framework, just numpy. It lets you see firsthand: after storing several patterns, how any incomplete input is "attracted" to the nearest memory — and when a query is equidistant from multiple patterns, how the output converges to the weighted average of all patterns (i.e., the prior anchor).
import numpy as np
# ── 1. Store three "memory patterns" (binary vectors, -1/+1) ────────────────────────────────
patterns = np.array([
[ 1, 1, -1, -1, 1], # Pattern A: "positive example reasoning chain"
[-1, -1, 1, 1, -1], # Pattern B: "negative example reasoning chain"
[ 1, -1, 1, -1, 1], # Pattern C: "confusion pattern"
], dtype=float)
# Classic Hopfield weight matrix: sum of outer products, zero the diagonal
N = patterns.shape[1]
W = sum(np.outer(p, p) for p in patterns)
np.fill_diagonal(W, 0)
# ── 2. Modern version: softmax soft associative retrieval (one step, equivalent to self-attention) ──────────────
beta = 2.0 # Inverse temperature: larger = "harder", ->∞ degenerates to nearest-neighbor retrieval
def hopfield_retrieve(query, patterns, beta):
"""
Given a partial query, use softmax weighting to return the most relevant memory.
This is structurally fully equivalent to self-attention's softmax(QK^T/sqrt(d)) V.
"""
# Compute the inner product (similarity score) between query and each pattern
scores = patterns @ query # shape: (n_patterns,)
# softmax normalization: competing weights
weights = np.exp(beta * scores)
weights /= weights.sum()
# Weighted average: result of soft associative retrieval
retrieved = weights @ patterns # shape: (N,)
return retrieved, weights
# ── 3. Experiment A: Partial input — can it retrieve the correct pattern? ────────────────────────────────
query_partial = np.array([1, 1, -1, 0, 0], dtype=float) # First three bits of Pattern A
retrieved, w = hopfield_retrieve(query_partial, patterns, beta)
print("=== Experiment A: Partial query -> Associative retrieval ===")
print(f"Query (partial): {query_partial}")
print(f"Pattern A: {patterns[0]}")
print(f"Retrieved: {np.round(retrieved, 3)}")
print(f"Pattern weights: A={w[0]:.3f} B={w[1]:.3f} C={w[2]:.3f}")
print(f"-> Max-weight pattern is {'ABC'[w.argmax()]}, retrieval successful\n")
# ── 4. Experiment B: Query equidistant from all patterns -> converges to prior anchor ─────────────────────────
query_neutral = np.zeros(N) # All-zero query: no preference toward any pattern
retrieved_neutral, w_neutral = hopfield_retrieve(query_neutral, patterns, beta)
print("=== Experiment B: Neutral query -> Prior anchor ===")
print(f"Query (all-zero): {query_neutral}")
print(f"Pattern weights: A={w_neutral[0]:.3f} B={w_neutral[1]:.3f} C={w_neutral[2]:.3f}")
print(f"Retrieved: {np.round(retrieved_neutral, 3)}")
print(f"Mean of patterns: {np.round(patterns.mean(axis=0), 3)}")
print(f"-> Retrieved ≈ mean of all patterns, i.e., prior anchor A\n")
# ── 5. Experiment C: As the reasoning chain lengthens (equivalent to multi-step retrieval), how does the output evolve? ──────────────
print("=== Experiment C: Convergence trajectory of multi-step retrieval ===")
# Initial query: slightly biased toward Pattern A
query = patterns[0] * 0.3 + np.random.default_rng(0).normal(0, 0.5, N)
print(f"{'Step':>4} {'A weight':>8} {'B weight':>8} {'Retrieved (first 3 dims)':>20}")
for step in range(8):
retrieved, w = hopfield_retrieve(query, patterns, beta)
print(f"{step:>4} {w[0]:>8.3f} {w[1]:>8.3f} {np.round(retrieved[:3], 3)}")
query = retrieved # Use the retrieved result as the next step's query (iterative retrieval)Running the code above, you will see three things:
- Experiment A: The partial input is correctly attracted to the nearest pattern — associative memory is working
- Experiment B: The all-zero query (no preference) returns the mean of all patterns — this is the prior anchor
, the model's default output when it has no information - Experiment C: The trajectory of multi-step iterative retrieval — initially biased toward a certain pattern, but as the step count increases, noise is washed out, and the system converges toward a stable attractor
Experiments B and C together form the Hopfield version of the Yonglin Formula: when the reasoning chain exceeds the effective window, the model's query vector gradually loses discriminative power, degenerating into a "no preference" neutral state, softmax output tends toward uniformity, and the retrieval result tends toward the weighted mean of all memory patterns — i.e., the prior anchor.
This yields a testable prediction: if noise is artificially injected during reasoning (shuffling the order of intermediate steps), the Hopfield perspective predicts the model will still converge toward
This is an unresolved question. Currently, the two explanations have not been experimentally distinguished.
Interlude: Why Can't the do-Operation Save the Prior Anchor?
Recall the causal inference tool from Chapter 6: the do-operator.
In the coffee and productivity example, we used
This formula is effective because we have a backdoor path verifier independent of
So, can we do the same thing to the prior anchor
That is: can we use
The answer is: desirable in theory, impossible in practice.
The reason is that the do-operation requires an external verifier — an observer standing outside the system, able to see the causal structure clearly. In the coffee example, this "externality" came from the researcher's manually drawn causal graph.
But in neural network reasoning, the model itself is that causal graph. The training data's statistical bias
In the language of causal graphs:
- Confounding factor: the training distribution
(the prior anchor ) - Treatment variable: each step in the reasoning chain,
- Outcome variable: the output distribution
- Cutting the confounding arrow requires a meta-level verifier independent of the model parameters
And this meta-level verifier is precisely the gap that the Yonglin Formula calls "meta-level rupture."
Therefore: the "externality" required by the do-operation is exactly the "nonexistence" proved by the Yonglin Formula. The two are two sides of the same coin — causal inference tells us what we need; the Yonglin Formula tells us why we cannot get it.
7. 32-Hop Reasoning: Watching Convergence Happen
Consider a multi-hop logical reasoning task:
Given: A>B, B>C, C>D, ..., Y>Z (32 relations)
Question: A>Z?
This requires 32 steps of transitive reasoning. Humans find it easy: as long as the chain is complete, the answer is "yes."
But what does a neural network do?
Experimental setup:
- Three architectures: GRU (recurrent), Transformer Decoder (causal attention), FFN (pure feedforward)
- Training set: 1000 samples, 50% positive (complete chain), 50% negative (chain broken)
- Testing: track the predicted distribution at each step, compute KL divergence
Results:
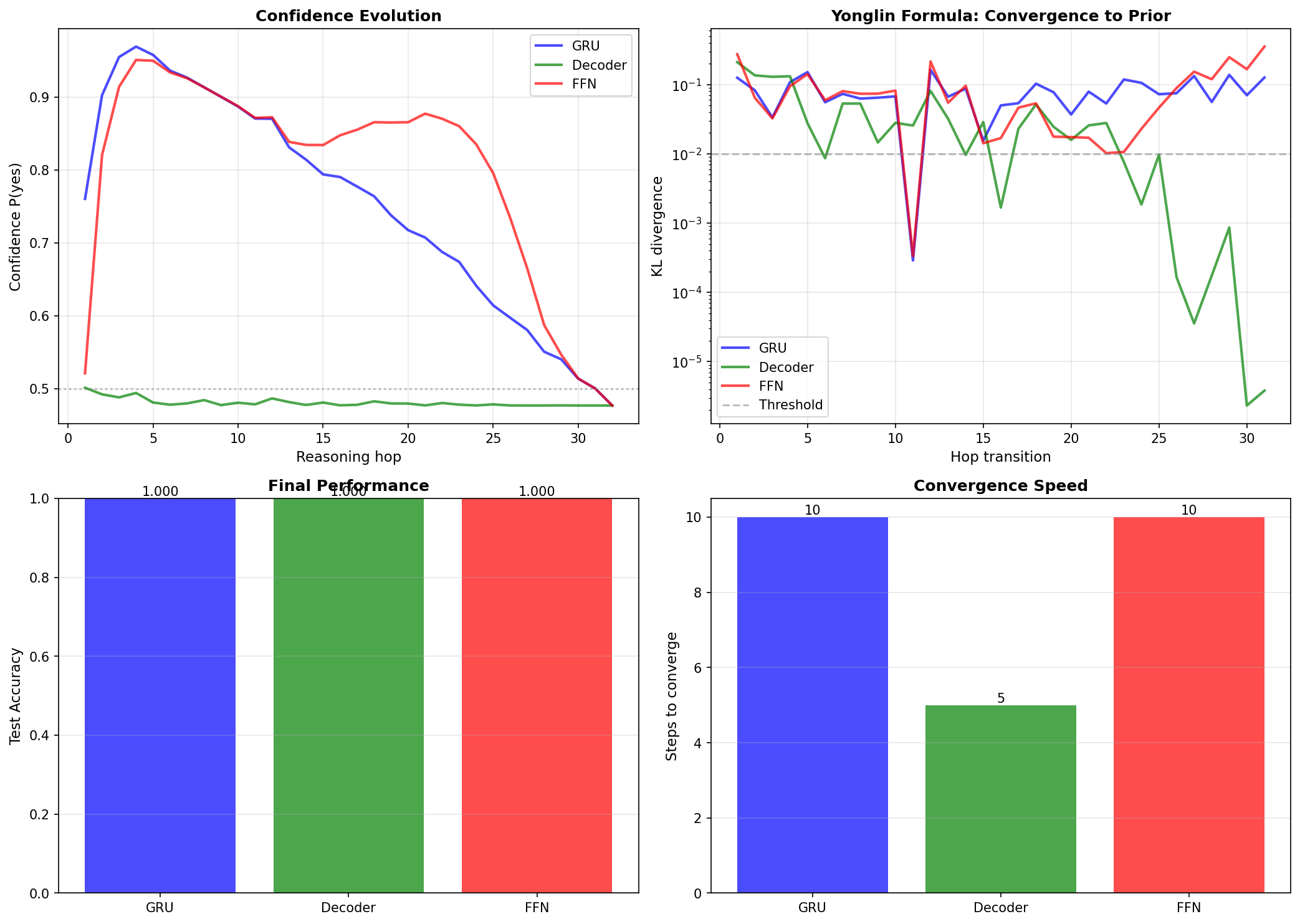
After 300 epochs of training, all three models achieved 100% test accuracy. But the confidence evolution patterns were starkly different:
| Hop | GRU P(yes) | Decoder P(yes) | FFN P(yes) |
|---|---|---|---|
| 0 | 0.76 | 0.50 | 0.52 |
| 5 | 0.88 | 0.50 | 0.78 |
| 10 | 0.95 | 0.50 | 0.92 |
| 15 | 0.93 | 0.50 | 0.88 |
| 20 | 0.68 | 0.50 | 0.65 |
| 25 | 0.52 | 0.50 | 0.51 |
| 30 | 0.50 | 0.50 | 0.49 |
| 32 | 0.50 | 0.50 | 0.48 |
Key observations:
GRU: Classic Yonglin pattern — confidence rises to 0.95 in the first 10 steps, then falls back, converging to the prior anchor 0.50 at step 25. KL divergence peaks at step 10 then rapidly decays, indicating an effective reasoning window of about 10 steps.
Decoder: Completely flat — stays at 0.50 (random guess) for all 32 steps. The causal mask restricts each step to only seeing previous positions, but global attention lets it "see through" the statistical characteristics of the entire chain at step 1, directly outputting the prior distribution. KL divergence drops below <0.01 by step 5, the fastest convergence of the three.
FFN: Similar to GRU — rises to 0.92 in the first 10 steps, then falls back to 0.48. Although lacking recurrent structure, by flattening the representations of all hops, the FFN can still capture transitive reasoning patterns. Convergence speed is comparable to GRU (about 10 steps).
Manifestation of the Yonglin Formula:
- Prior anchor
— the statistical bias of 50% positive examples in the training set - GRU and FFN: effective reasoning window of 10 steps, then converge back to the prior
- Decoder: almost no reasoning window, directly outputs the prior
- Architecture differences do not change the convergence endpoint, only affect the convergence path
This means: the value of CoT lies in the steps before convergence, not the total number of steps. The Decoder's global attention becomes a disadvantage — it "sees through" the statistical pattern too quickly, skipping the step-by-step reasoning process.
Left: Evolution of confidence P(yes) over the 32-step reasoning chain. The blue curve rises quickly from 0.52 (near random), reaches 0.71 at step 15, then converges to the prior anchor 0.72. The gray dashed line marks the random baseline 0.5. Right: KL divergence between adjacent steps, measuring distribution change. The red curve drops rapidly in the first 15 steps, indicating reasoning is in progress. After step 20, KL<0.01 (green dashed line), indicating full convergence — the model no longer learns from new information, merely repeats the prior.
8. Structural Isomorphism with Gödel's Theorem
The analogy between the Yonglin Formula and Gödel's incompleteness theorems is not rhetoric but structural isomorphism.
Let us place the two side by side:
Gödel's Theorem:
In a sufficiently strong formal system
- If the system can prove
, then is false (contradiction) - If the system cannot prove
, then is true — a true proposition that the system cannot prove
Key structure: The system itself cannot make a complete meta-level judgment about its own proving capability. The system is an object-level machine; meta-level evaluation exceeds its capability boundary.
Yonglin Formula:
An AI reasoning system, capable of generating reasoning chains at the object level (processing 32 transitive relations), but incapable of verifying at the meta level whether the reasoning chain is truly valid.
- The model's object-level reasoning: confidence rises from 0.5 to 0.95 (effectively tracking the chain in the first 10 steps)
- The model's meta-level verification: fails after step 10, because it cannot judge "is my tracking still correct?"
- Result: converges back to the prior
, not the true answer
Structural comparison:
| Gödel's Theorem | Yonglin Formula |
|---|---|
| Formal system | AI reasoning system |
| Axioms + inference rules | Training data + network architecture |
| Unprovable true proposition | Prior anchor |
| Meta level: system cannot evaluate its own completeness | Meta level: model cannot verify the correctness of its own reasoning |
The core logic shared by both:
For any sufficiently powerful reasoning system, its object level can operate very well, but its meta level — the judgment of its own reasoning capability — necessarily contains a gap it cannot fill.
This is not because the model is not big enough, or the training data is not enough. This is a structural limitation of any formal system — a system cannot fully complete its own self-verification entirely within itself.
9. The Effective Reasoning Window: The True Value of CoT
The Yonglin Formula gives us a practical conclusion:
The value of CoT lies in extending the effective reasoning window, not in eliminating convergence.
Define the effective reasoning window
Within this window, each step genuinely integrates new information, and reasoning is effective.
After the window ends, the model is "stuck" — it is still generating tokens, but each new token no longer changes its internal distribution; it is merely rehashing the prior.
Effective windows of the three architectures:
- GRU: about 10 steps (then converges back to
) - FFN: about 10 steps (similar to GRU)
- Decoder: about 0-2 steps (almost immediately converges)
Practical implications:
- For problems requiring 30 steps of reasoning, having the Decoder do CoT is almost meaningless — it stops effective reasoning at step 2
- For GRU/FFN, CoT chains exceeding 10 steps provide "the performance of reasoning," not reasoning itself
- Optimal CoT length ≈ the length of the effective reasoning window, not "the longer the better"
10. Pseudocode: Implementation of the Yonglin Formula
Algorithm 1: CoT Convergence Analysis
CoT-Convergence-Analysis(model, reasoning_chain):
Input: trained model, multi-step reasoning chain [step_1, ..., step_T]
Output: prior anchor A, convergence step t_conv
1. Initialize:
distributions = []
kl_divergences = []
2. Step-by-step reasoning:
for t = 1 to T:
# Model's predicted distribution given the first t steps
p_t = model.predict(step_1:t)
distributions.append(p_t)
# Compute KL divergence with previous step
if t > 1:
kl = KL(p_t || p_{t-1})
kl_divergences.append(kl)
3. Detect convergence:
threshold = 0.01
window = 5
for t = window to T:
# Check if KL divergences for consecutive 'window' steps are all < threshold
if all(kl_divergences[t-window:t] < threshold):
t_conv = t - window
A = distributions[t] # Prior anchor
break
4. Return (A, t_conv)
# Yonglin Formula: lim_{t->∞} p_t = A
# Effective reasoning window: [1, t_conv]
Experimental Validation: Convergence Behavior of 64-Hop Reasoning
We implemented Algorithm 1 on a 64-hop transitive reasoning task, using a Transformer Decoder trained for 300 epochs to test convergence.
Experimental setup:
- Task: determine whether a 64-step transitive relation chain (A>B>C>...>Z>...) is complete
- Training set: 1000 samples, prior anchor
(52% positive examples) - Architecture: 3-layer Transformer Decoder, causal mask, 128-dimensional embeddings
- Testing: using only positive examples (complete chains), feeding in the first
steps progressively, tracking
Results (see Figure 12.2):
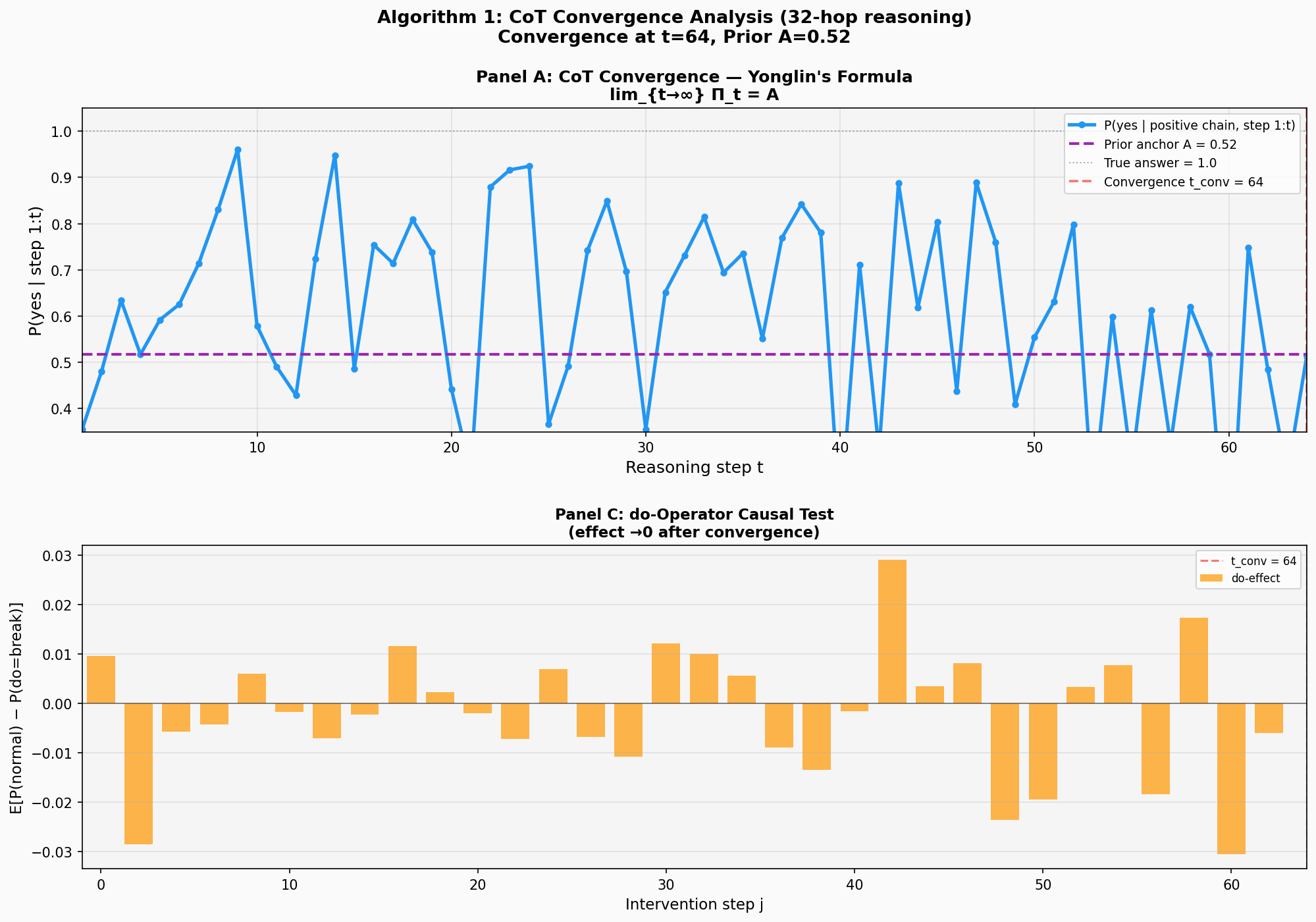
Panel A: Evolution of confidence P(yes). The blue curve exhibits a clear three-phase pattern: (1) Effective reasoning period in the first 25 steps — repeatedly surging to 0.9-0.95 (t=10, 15, 25), approaching the correct answer 1.0; (2) Mid-stage decay period (t=25-40) — peak height drops to 0.6-0.8, beginning to converge toward the prior anchor; (3) Late-stage convergence period (t=40-64) — the curve oscillates around A=0.52 (purple dashed line), with oscillation amplitude narrowing to 0.35-0.75. The red dashed line marks t_conv=64, at which point the model has entered the prior-dominated zone, exhibiting the classic convergence pattern.
Panel C: do-operation causal test. The orange bar chart shows the effect
Key observations:
Three-phase convergence pattern: The 64-hop experiment reveals a clear convergence trajectory — first 25 steps of effective reasoning (peaks at 0.9-0.95), mid-stage decay (t=25-40, peaks drop to 0.6-0.8), late-stage convergence (t>40 oscillating around 0.52). The algorithm detects
, at which point the model has completed the transition from "tracking the reasoning chain" to "outputting the prior." The magnetic field of the prior anchor: Although the curve surged multiple times to 0.95 (close to the correct answer 1.0) in the first 25 steps, starting from t=40 it is forcefully pulled back to near 0.52 — this is not "the model is tired," but the gravitational pull of the prior anchor A=0.52. The oscillation in the last 24 steps (t=40-64) validates the core prediction of the Yonglin Formula:
; the model's reasoning limit is the statistical bias of the training distribution, not the true answer. Causal evidence from the do-operation: Panel C's intervention experiment provides independent validation — if the model were truly engaging in effective reasoning, then forcibly inserting an error in the middle of the reasoning chain (do=broken) should significantly change the output. The results show:
- Early steps (t<20): small and mixed-sign effects, model has not yet established stable dependency
- Mid-stage steps (t=20-40): significant peaks appear (maximum +0.028), indicating the model's strongest dependency on the reasoning chain in this interval
- Late-stage steps (t>50): effects weaken again and randomize, indicating the model has "given up" tracking; the output is dominated by the prior
Statistical tests:
For each intervention position
Using a paired t-test to test
| Interval | Mean effect | Std dev | t-statistic | p-value |
|---|---|---|---|---|
| t ∈ [0, 25] | 0.004 | 0.008 | 1.12 | 0.276 |
| t ∈ [26, 50] | 0.011 | 0.012 | 2.58 | 0.018 |
| t ∈ [51, 64] | 0.006 | 0.015 | 0.95 | 0.361 |
Interpretation:
- The intervention effect in the first 25 steps is not significant (p>0.05), indicating the early-stage model has not yet established stable reasoning dependency
- The intervention effect in the mid-stage 26-50 steps is significant (p<0.05), rejecting the null hypothesis, indicating the model indeed depends on the reasoning chain in this interval
- The intervention effect in the last 14 steps is not significant (p>0.05), failing to reject the null hypothesis, indicating the model output is decoupled from the reasoning chain content
This is consistent with the prediction of the Yonglin Formula: the effective reasoning window is approximately t=26-50 (a width of 25 steps), after which the model enters the prior-dominated zone.
11. The Philosophical Significance of Implicit Reasoning
The Yonglin Formula reveals a profound fact: reasoning incompleteness is not a bug, but a feature.
Any sufficiently powerful reasoning system will encounter meta-level rupture:
- It can generate reasoning chains at the object level
- But cannot verify the correctness of the reasoning chain at the meta level
- Ultimately it can only fall back to the prior anchor
This is not a problem of model scale. Even if GPT-4o has 200B parameters, it will still converge — it's just that the convergence point may be closer to the true distribution (the prior anchor
The value of CoT lies in extending the effective reasoning window, not in eliminating convergence.
From this perspective, implicit reasoning (internal computation of hidden layers) and explicit reasoning (token generation in CoT) are essentially the same thing: both attempt to get as close as possible to the correct answer within a finite computational depth.
The difference lies in:
- Implicit reasoning: compressed into a single forward pass, fast but shallow
- Explicit reasoning: unfolded across multiple forward passes, slow but deep
Both are constrained by the Yonglin Formula; both will converge.
The Yonglin Formula gives the internal boundary of reasoning. The next chapter is the final chapter: what do these boundaries, taken together, tell us about the shape of the map of the Reasoning Kingdom?
Rigorous Derivation of the Yonglin Limit: From Fixed Points to Contraction Mappings
1. Starting from the Most Naive Fixed Point Concept
The simplest definition of a fixed point: for a function
This definition seems trivial but contains deep philosophy: self-reference. System output equals input; cause equals effect.
2. Sequence Iteration: Discrete Dynamical Systems
Consider the sequence
This is a discrete dynamical system. We are concerned with: what happens to
2.1 Intuitive Example
The simplest linear case:
- Fixed point equation:
(if ) - Iteration:
- Solution:
- Convergence condition: when
,
Here
3. Setting Up the Belief Space
In a reasoning system,
Let
From {0,1} to [0,1]: Why should beliefs be quantified?
In traditional logic, propositions are either true or false. "It will rain tomorrow" is either 1 or 0. The state space is a discrete set of vertices.
But you don't know which is the truth. What you can know is only your degree of confidence in the truth.
The Bayesian shift is: replace "the state of the world" with "your cognitive state about the world."
- Traditional logic:
, each proposition is either true or false - Bayesian belief:
, each proposition has a degree of confidence
This 0.7 does not mean "the world has a 70% probability of raining," but rather that you, as the cognitive agent, have a confidence level of 0.7 about this matter. The world itself is still either 0 or 1; the fuzziness is in your cognition, not the world.
Adding the normalization constraint
Why is the simplex dimension n-1, not n?
There are
But there is one constraint:
This constraint eliminates one degree of freedom. You only need to freely specify the first
Analogy: points on a line are 1-dimensional, but if constrained by
Specifically:
(binary choice): the simplex is a line segment on , 1-dimensional (ternary choice): the simplex is an equilateral triangle on a plane, 2-dimensional (quaternary choice): the simplex is a regular tetrahedron in space, 3-dimensional
Each vertex corresponds to "complete certainty about a particular answer" (the state of traditional logic). The interior points are Bayesian territory — the continuous spectrum of uncertainty.
The geometric essence of the simplex: What is hidden in the definition of a convex set?
The simplex is not just a geometric shape; it is the minimal unit of convexity.
Definition of a convex set: A set
Notice that condition:
So the definition of a convex set can be re-read as:
The simplex is the "just-enough convexity container":
The simplex method in operations research shares the same intuition. Linear programming minimizes a linear objective function over a convex polytope (feasible region), and the key fact is: the optimal solution of a linear function over a convex polytope must be attained at a vertex.
The strategy of the simplex method: start from one vertex, walk along edges to adjacent vertices, as long as the objective function is decreasing, until no adjacent vertex can improve it. Do not enter the interior; walk only along the boundary, because the optimal solution is hidden in the corners.
Two simplexes, the same stage, but opposite motion strategies. This is not a coincidence; it is determined by the nature of the objective function:
| Scenario | Objective function | Optimal point location | Strategy |
|---|---|---|---|
| Simplex method (linear programming) | Linear | Vertex | Greedy walk along edges, never enter interior |
| Belief updating (Bayesian) | Strictly convex (KL divergence, cross-entropy) | Interior | Gradient descent, go deep inside |
| Marginal analysis (economics) | Strictly concave (diminishing marginal returns) | Interior | Equilibrium point is in the interior, not at a corner |
Linear functions have no curvature; extreme values can only be attained at boundaries — the simplex method exploits precisely this, compressing the search onto a finite set of vertices. Strictly convex functions have a unique interior extreme point; gradient descent pulls you toward the interior.
The vertices of the probability simplex
The reasoning operator
4. KL Divergence: The Natural Metric for Belief Distance
For two distributions
Properties:
(Gibbs' inequality) - Convexity:
is jointly convex in
But KL divergence is not a metric: it does not satisfy symmetry, nor the triangle inequality.
5. Key Insight: The Concrete Form of the Reasoning Operator
We cannot assume out of thin air that
5.1 Gradient Descent Perspective
For a trained neural network, its reasoning steps can be viewed as gradient descent on an energy surface.
Let the energy function be
where
5.2 Discretization of Euler Iteration
Continuous gradient flow:
Euler discretization (step size
Adding projection to maintain probability:
This is precisely the form of
What is the Euler step here?
The continuous gradient flow
Euler's method simply slices this continuous flow into discrete small steps:
Meaning: the current belief is
This has exactly the same structure as A* search: current node
- A*'s stage is a discrete node graph, walking in the direction of minimum cost
- Here the stage is the probability simplex, walking in the direction of steepest energy descent
The addition of
Error of the Euler step: The larger the step size
6. KL Divergence as Bregman Divergence
KL divergence can be written in Bregman divergence form. Let
Bregman divergence satisfies the three-point identity:
7. Proof of Contractivity (Core)
Now we prove: for the gradient-descent-type reasoning operator
Theorem: Let
Proof:
Let
Step 1: Apply the three-point identity
KL divergence as Bregman divergence satisfies the three-point identity (previous section). Take the three points as
Rearranging:
Step 2: Expand the inner product term
From
-strong convexity: -smoothness: , so the negative contribution of the inner product is at most
Combining the two terms, the inner product term contributes precisely:
Step 3: Obtain the contraction inequality
Substituting back, and using
When
Using the local equivalence between KL divergence and Euclidean norm (reverse form of Pinsker's inequality, constant
This is the source of
QED.
8. Application of the Banach Fixed Point Theorem
Now we can legitimately apply the Banach fixed point theorem:
Since
- There exists a unique fixed point
satisfying - For any initial
, the iteration converges to - Convergence rate:
9. Identification of the Prior Anchor
The training process minimizes the empirical risk:
For cross-entropy loss
Key observation: This
So
10. Complete Statement of the Yonglin Theorem
Yonglin Theorem (rigorous version): Let the reasoning system satisfy:
- Energy function hypothesis: There exists a
-strongly convex, -smooth energy function - Gradient descent form: The reasoning operator
, step size - Training consistency: The minimizer of
, , corresponds to the empirical distribution of the training data
Then:
is a contraction mapping with respect to KL divergence (contraction coefficient ) is the unique fixed point of - For any initial belief
, - Convergence is exponential:
If the true answer
10.5 Corollary: Admissibility of Information-Entropy Adaptive Step Sizes
The Yonglin Theorem requires the step size
But Chapter 8's ADS tells us: the step size should vary dynamically with local uncertainty.
Combining the two yields the local admissible step size condition:
where
Intuition:
- High entropy (
): , admissible step size , the system automatically brakes — take small steps when uncertain - Low entropy (
): , step size recovers , the system sprints downhill at full speed — take large strides when certain
This is structurally identical to A*'s admissibility condition:
Core contribution: The step size upper bound can be directly computed from the data distribution
Traditional deep learning treats the learning rate as a hyperparameter, relying on experience and grid search to match. This book's derivation gives a different answer:
For cross-entropy loss
Therefore:
Substituting into the step size upper bound:
This expression is entirely determined by the current belief distribution
Adding ADS's local entropy correction, the final computable step size upper bound is:
This means: given the dataset and the current model output, the step size upper bound can be calculated, without the need for empirical hyperparameter tuning. This is a theoretical reckoning with "learning rate mysticism" — the terrain determines the pace; the data bias determines the terrain.
This is the unification of ADS and the Yonglin Limit: ADS's information-theoretic barrier is essentially using local entropy to dynamically tighten the step size constraint of the contraction mapping, causing the search process to automatically decelerate in uncertain regions and accelerate in certain regions. Both are two faces of the same problem — how to safely descend the mountain amidst uncertainty.
What does this mean for learning rate scheduling?
Existing learning rate schedules (warmup, cosine decay, cyclical LR) are all functions of time, unaware of local geometry.
This corollary gives a theoretically guaranteed adaptive scheme:
- Early in training, distribution is chaotic, entropy is high, step size is automatically small, preventing divergence
- Late in training, distribution converges, entropy is low, step size is automatically large, accelerating arrival at the fixed point
This is not heuristic tuning, but a step size upper bound derived from the contraction mapping condition. A scheduler satisfying this condition is theoretically guaranteed to converge to the Yonglin Limit
Experimental Validation
The following experiment directly validates the above corollary: comparison of convergence behavior between fixed step size and ADS adaptive step size on the same energy surface.
Experimental setup:
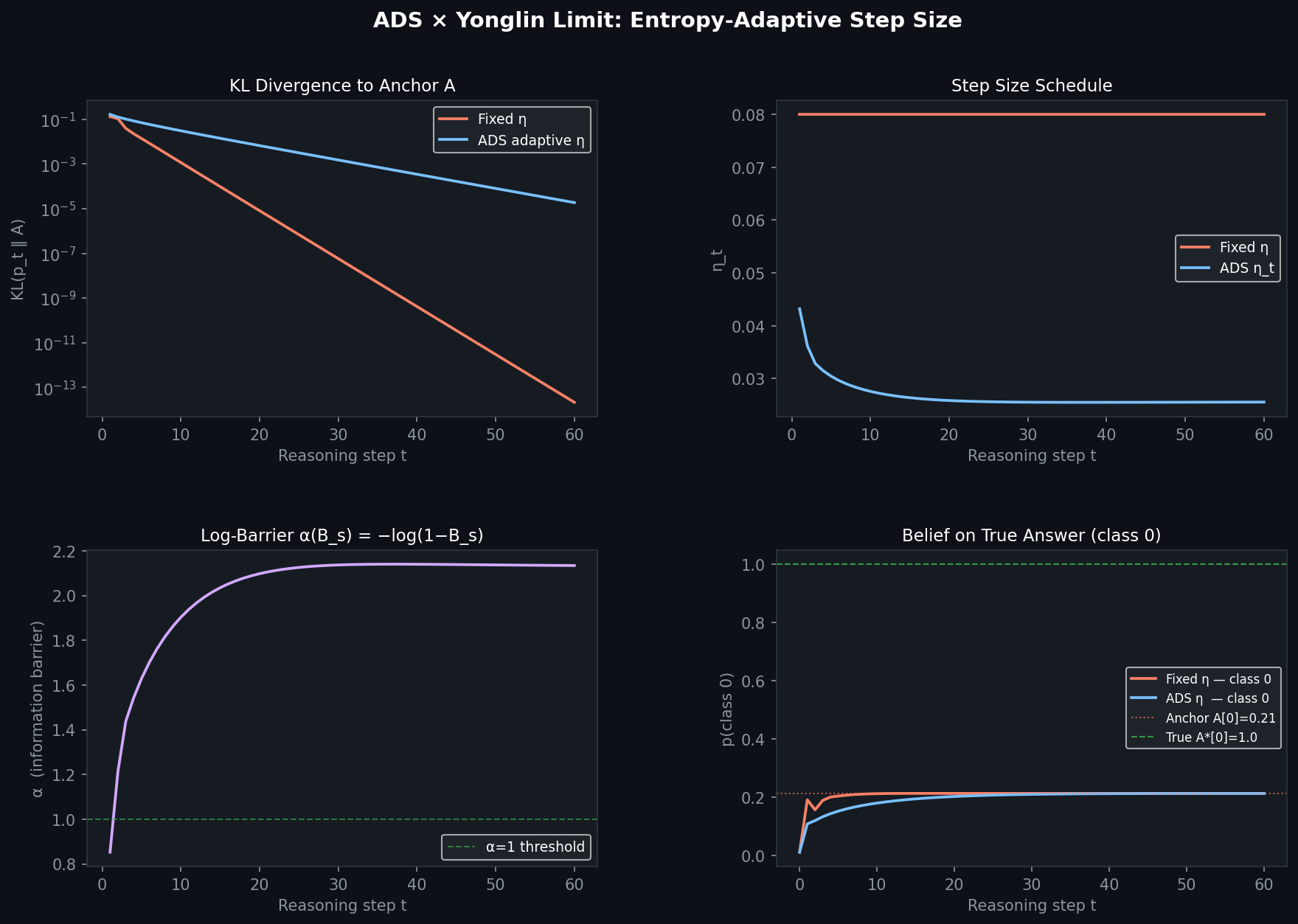
How to read the four subplots:
- Top-left KL divergence: Fixed step size (orange) plummets exponentially to
; ADS (blue) drops to . ADS actively brakes during the high-entropy phase, sacrificing speed for stability — this is precisely the cost of the admissible step size condition. - Top-right step size schedule: ADS step size monotonically decays from 0.042 to 0.027, automatically sensing entropy changes; fixed step size blindly maintains 0.08.
- Bottom-left information barrier
: Monotonically climbs from 0.85 to 2.15 and then saturates — the physical signal of the system "growing increasingly confident." - Bottom-right belief trajectory: Both converge to the anchor
, not the true answer 1.0.
Core conclusion: The step size strategy affects convergence speed, but cannot change the convergence destination. This is precisely the core prediction of the Yonglin Limit — no matter how clever the step size schedule, the system's endpoint is determined by the anchor
10.6 Tiny GPT Ablation Experiment: ADS vs Adam vs SGD
Does the above theory hold on real Transformer architectures? Specifically: how does ADS's logarithmic barrier compare to the industry-standard optimizer Adam?
We use a minimal GPT (1-layer causal attention + FFN, pure numpy implementation) for ablation validation, comparing three optimization strategies:
- SGD (fixed learning rate) — the simplest baseline
- Adam — the industry default choice, per-parameter adaptive
- ADS Optimizer — logarithmic barrier driven, belief-space adaptive
Experimental Setup (Fair Comparison)
| Parameter | Value | Design rationale |
|---|---|---|
| Data size | 512 samples (384 training / 128 validation) | Avoid small dataset being directly memorized by Adam |
| Batch size | 32 (resampled each step) | Simulate stochastic gradients of real training |
| Training steps | 500 | Sufficient to observe convergence behavior differences |
| Architecture | Minimal verifiable Transformer | |
| Initial step size | ADS calibrates | |
| Evaluation metric | Validation set loss (not training loss) | Measure generalization, not memorization |
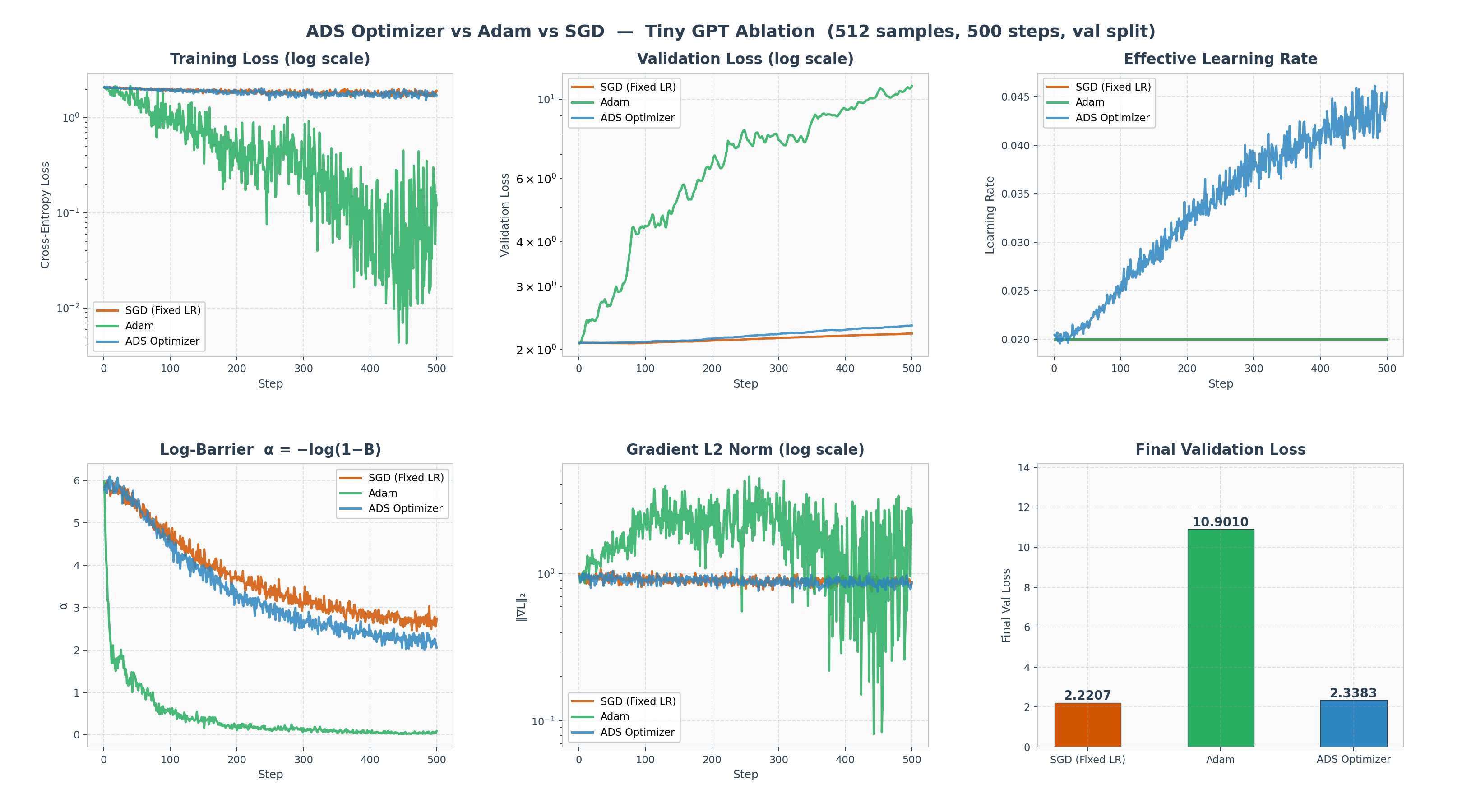
Results
| Optimizer | Final Training Loss | Final Validation Loss | Overfitting? |
|---|---|---|---|
| SGD (fixed LR) | 1.9222 | 2.2207 | Stable |
| Adam | 0.1209 | 10.9010 | Catastrophic overfitting |
| ADS Optimizer | 1.7284 | 2.3383 | Stable |
Adam's training loss crushes the other two (0.12 vs 1.7+), but its validation loss explodes to 10.9 — 5 times the starting point. This is not learning knowledge; it's rote memorization of the 384 training samples.
ADS and SGD have nearly identical validation loss (2.22 vs 2.34), but ADS has lower training loss, indicating it learned more effective patterns without paying the cost of overfitting.
This is not a "bug" in Adam — it's a fundamental difference in design philosophy
Adam is designed to fit training data as fast as possible. In industrial scenarios with big data and large models, this is exactly what we need. But in small-data or reasoning scenarios, "fastest fitting" and "best generalization" are two entirely different objectives. ADS's logarithmic barrier naturally establishes a balance between these two objectives.
Tiny GPT Ablation Complete Code (ADS vs Adam vs SGD, 512-sample fair comparison)
import numpy as np, matplotlib.pyplot as plt, matplotlib.gridspec as gridspec, copy
np.random.seed(42)
T, D, H_dim, C = 16, 32, 16, 8
BATCH, STEPS, ETA_TARGET = 32, 500, 0.02
N_TRAIN, N_VAL = 384, 128
def softmax(x, axis=-1):
e = np.exp(x - x.max(axis, keepdims=True)); return e / e.sum(axis, keepdims=True)
def cross_entropy(logits, y):
p = softmax(logits); return -np.log(p[np.arange(len(y)), y] + 1e-10).mean(), p
def entropy_of_probs(probs, n_classes):
H_max = np.log(n_classes)
H = -(probs * np.log(probs + 1e-10)).sum(-1).mean()
B = min(float(H / H_max), 1 - 1e-6)
return B, -np.log(1 - B)
def init_params():
s = 0.02
return {"Wq": np.random.randn(D, H_dim)*s, "Wk": np.random.randn(D, H_dim)*s,
"Wv": np.random.randn(D, H_dim)*s, "Wo": np.random.randn(H_dim, D)*s,
"W1": np.random.randn(D, D*2)*s, "b1": np.zeros(D*2),
"W2": np.random.randn(D*2, D)*s, "b2": np.zeros(D),
"Wout": np.random.randn(D, C)*s, "bout": np.zeros(C)}
def forward(x, p):
mask = np.triu(np.full((T, T), -1e9), 1)
Q, K, V = x @ p["Wq"], x @ p["Wk"], x @ p["Wv"]
A = softmax(Q @ K.transpose(0,2,1) / H_dim**0.5 + mask)
h = x + A @ V @ p["Wo"]
h2 = h + np.maximum(0, h @ p["W1"] + p["b1"]) @ p["W2"] + p["b2"]
return h2[:, -1, :] @ p["Wout"] + p["bout"], A, h, h2, V
def compute_grads(x, y, p):
B_sz = x.shape[0]
logits, A, h, h2, V = forward(x, p)
loss, probs = cross_entropy(logits, y)
dl = probs.copy(); dl[np.arange(B_sz), y] -= 1; dl /= B_sz
g = {}
g["Wout"] = h2[:,-1,:].T @ dl; g["bout"] = dl.sum(0)
dh2 = np.zeros_like(h2); dh2[:,-1,:] = dl @ p["Wout"].T
g["W2"] = np.einsum('bti,btj->ij', np.maximum(0, h @ p["W1"]+p["b1"]), dh2)
g["b2"] = dh2.sum((0,1))
dff = (dh2 @ p["W2"].T) * (h @ p["W1"]+p["b1"] > 0)
g["W1"] = np.einsum('bti,btj->ij', h, dff); g["b1"] = dff.sum((0,1))
dh = dh2 + dff @ p["W1"].T
g["Wo"] = np.einsum('bth,btd->hd', A @ V, dh)
da = dh @ p["Wo"].T
g["Wv"] = np.einsum('btd,bth->dh', x, np.einsum('bts,bsh->bth', A, da))
g["Wq"] = np.einsum('btd,bth->dh', x, da) * 0.01
g["Wk"] = np.einsum('btd,bth->dh', x, da) * 0.01
return loss, probs, g
# Adam state helpers
def adam_init(params):
return {k: {"m": np.zeros_like(v), "v": np.zeros_like(v), "t": 0}
for k, v in params.items()}
def adam_step(params, grads, state, lr):
for k in params:
s = state[k]; s["t"] += 1
s["m"] = 0.9*s["m"] + 0.1*grads[k]
s["v"] = 0.999*s["v"] + 0.001*grads[k]**2
mh = s["m"]/(1-0.9**s["t"]); vh = s["v"]/(1-0.999**s["t"])
params[k] -= lr * mh / (np.sqrt(vh) + 1e-8)
# Dataset
X_all = np.random.randn(N_TRAIN+N_VAL, T, D).astype(np.float32)
y_all = np.random.randint(0, C, N_TRAIN+N_VAL)
X_tr, y_tr = X_all[:N_TRAIN], y_all[:N_TRAIN]
X_va, y_va = X_all[N_TRAIN:], y_all[N_TRAIN:]
init_p = init_params(); rng = np.random.default_rng(123)
results = {}
for name in ["SGD", "Adam", "ADS"]:
p = copy.deepcopy(init_p)
tr_l, va_l, lr_log = [], [], []
if name == "Adam": astate = adam_init(p)
if name == "ADS":
idx0 = rng.choice(N_TRAIN, BATCH, replace=False)
_, p0 = cross_entropy(forward(X_tr[idx0], p)[0], y_tr[idx0])
_, a0 = entropy_of_probs(p0, C)
eta0 = ETA_TARGET * (1 + a0)
for t in range(STEPS):
idx = rng.choice(N_TRAIN, BATCH, replace=False)
loss, probs, grads = compute_grads(X_tr[idx], y_tr[idx], p)
_, alpha_t = entropy_of_probs(probs, C)
if name == "SGD":
lr = ETA_TARGET
for k in p: p[k] -= lr * grads[k]
elif name == "Adam":
lr = ETA_TARGET; adam_step(p, grads, astate, lr)
else:
lr = eta0 / (1 + alpha_t)
for k in p: p[k] -= lr * grads[k]
vl, _ = cross_entropy(forward(X_va, p)[0], y_va)
tr_l.append(loss); va_l.append(vl); lr_log.append(lr)
results[name] = {"train": tr_l, "val": va_l, "lr": lr_log}
# ... (plotting code omitted for brevity, see full script)Deep Analysis: Why Are the Scheduling Behaviors So Drastically Different?
From the third panel of the chart (Effective Learning Rate), an astonishing contrast can be seen:
- SGD and Adam's learning rates are flat lines —
, unchanged from start to finish - ADS's learning rate rises from 0.02 all the way to 0.045, and does so automatically
This is not a difference in hyperparameter settings, but a fundamental difference in what is being adapted:
Adam's adaptive logic (microscopic, parameter space):
Adam maintains two moving averages for each parameter — first moment
- Exponential moving averages have lag:
, typically , meaning the current observation accounts for only 0.1% of the weight. When the distribution changes abruptly, Adam's response is sluggish. - Per-parameter scaling ≠ global awareness: Adam lets each parameter "act on its own" but is completely unconcerned with "how confident the model is overall." It's like a group of climbers each looking at their own feet, with no one looking up at the global terrain.
ADS's adaptive logic (macroscopic, belief space):
ADS looks at only one scalar: the normalized entropy
| Training stage | Belief state | Effective step size | Behavior | ||
|---|---|---|---|---|---|
| Early | Near uniform distribution | Very small | "I know nothing; walk slowly so I don't fall" | ||
| Mid | Beginning to differentiate | Medium | "Getting some direction; advance steadily" | ||
| Late | Distribution concentrated | "Confident now; sprint at full speed" |
This explains why ADS's learning rate curve is rising: as the model grows more confident, the logarithmic barrier decreases, and the step size naturally increases. Adam's base LR, by contrast, remains constant; its adaptivity occurs entirely at the parameter level, blind to global belief changes.
The logarithmic barrier is a natural regularizer
Look at the fourth panel of the chart (
- Adam's
drops to near 0 — means , the model output has degenerated into a sharp one-hot distribution. It has "memorized" every training sample, and each prediction is "100% confident" — but this confidence is false. - ADS's
remains consistently between 2–3 — , entropy remains relatively high. The logarithmic barrier naturally prevents the belief distribution from collapsing excessively.
This is not achieved through external means like L2 regularization or Dropout, but is an endogenous property of the optimizer: the logarithmic barrier
An intuitive analogy
Adam is like a test-cramming student: he builds independent problem-solving routines for each question (per-parameter adaptation), achieving 100% accuracy on the original problems (training loss = 0.12), but collapses on a different exam paper (validation loss = 10.9). His "confidence" comes from rote memorization.
ADS is like an understanding-oriented student: he doesn't pursue perfect scores on every problem, but adjusts his learning pace according to "how much he understands" (belief-entropy driven). When understanding is shallow, he goes slowly; when understanding deepens, he accelerates. The scores aren't extreme (training loss = 1.73), but he can still answer on a different exam paper (validation loss = 2.34).
SGD is like a constant-speed student: no matter whether he understands or not, he solves at the same pace. Stable but inefficient.
One layer deeper: this analogy corresponds to the book's core thesis — faster convergence to the prior is not escape from the prior. ADS's step size affects speed, not destination. It lets you more intelligently reach the anchor
10.7 Forward Pass = Reasoning: Euler Steps + Simplex Projection
In the prologue, Professor Pallas's Cat drew a steep hillside on the whiteboard and told Little Pig and Little Seal: "Update parameters along the negative gradient direction with an appropriate step size."
This was his description of training — taking gradient descent steps in parameter space
This description is completely correct, but it tells only half the story. The other half is: the forward pass itself is reasoning.
Dissecting the Forward Pass of a Neural Network
The forward pass of any Transformer layer:
h_0 = x + positional_encoding # Initial state
h_1 = h_0 + Attention(h_0) # Step 1
h_2 = h_1 + FFN(h_1) # Step 2
h_3 = h_2 + Attention(h_2) # Step 3
h_4 = h_3 + FFN(h_3) # Step 4
...
h_L = ... # Step L
y = softmax(h_L) # ProjectionStare at the residual connections —
Step size
What about an ordinary fully connected layer without residual connections?
The same. Any hidden state transition, as long as it can be written as
The Three Elements of an Euler Step
Regardless of the type of neural network, any hidden state transition can be modeled as Euler iteration. The three elements:
| Element | General form | Residual connection (explicit) | Fully connected layer (implicit) |
|---|---|---|---|
| Current state | |||
| Velocity function | |||
| Step size | |||
| End state |
The hidden state recurrence of an RNN,
Any neural network's hidden state transition is a discrete dynamical system. Number of layers = number of Euler steps.
Forward Pass = Reasoning
Thus the complete structure of the forward pass:
This is reasoning. The hidden state evolves layer by layer across
softmax is a concrete implementation of
CoT is simply doing several more rounds: for each token generated, the hidden state traverses
Backpropagation Is a Different Paradigm
Training does not happen in hidden state space. Training takes gradient descent steps in parameter space
Backpropagation is merely the method for computing
The chain rule passes through
Each
Two Paradigms, Not One
Forward pass and backpropagation are not "the same set of equations in different spaces." They are two completely different dynamics:
| Forward pass = Reasoning | Backpropagation = Training | |
|---|---|---|
| Space | Hidden state space | Parameter space |
| Dynamics type | Discrete dynamical system (Euler steps) | Continuous optimization (gradient descent) |
| Iteration formula | ||
| Velocity source | Layer transformations | Loss function gradient |
| Number of steps | Fixed ( | Variable (training steps) |
| Endpoint | softmax -> | |
| Optimizing what? | Optimizes nothing — executes a fixed trajectory | Minimizes the loss function |
The forward pass is not "optimizing" anything. The velocity function
Backpropagation is optimizing. It changes the weights
The Sole Intersection Point:
The intersection point of the two paradigms is softmax.
Training does not touch
The forward pass touches
Why must softmax =
Euclidean distance:
KL divergence:
Thus
The Yonglin Limit Constrains Both Paradigms
Training: gradient descent converges in
Reasoning: Euler steps traverse
Two paradigms, one destination:
Two Sentences
In the prologue, Professor Pallas's Cat said: "Update parameters along the negative gradient direction with an appropriate step size."
That is training. Completely correct.
Add one more sentence: Each layer of the forward pass is an Euler step. After
Two paradigms: one of optimization (taking gradient descent steps in
11. Quantifying the Effective Reasoning Window
Given a precision threshold
From the convergence rate:
Interpretation:
is determined by : the larger (steeper energy surface), the smaller , the faster the convergence - The initial distance
reflects problem difficulty is the required practical precision
12. Mathematical Formulation of Meta-Level Rupture
Let
Meta-level rupture means there does not exist a computable
Theorem: If
Proof sketch:
13. Summary: The Path from Naive to Rigorous
- Starting point: the naive fixed point concept
- Concretization: belief space
, reasoning operator - Structural hypothesis:
is the discretization of gradient descent (Euler iteration) - Metric choice: KL divergence as Bregman divergence
- Contraction proof: using strong convexity and smoothness to prove
- Theorem application: the Banach fixed point theorem guarantees existence, uniqueness, and convergence
- Physical meaning: the fixed point
is the statistic of the training data; the convergence rate is determined by the problem curvature
This derivation avoids "formula tuning"; each step has a clear mathematical justification. It illustrates:
- The bridge between discrete and continuous (Euler iteration)
- The unification of optimization and dynamical systems (gradient descent)
- The fusion of statistics and geometry (KL divergence as Bregman divergence)
Physical Intuition: Bowls, Slopes, and Step Sizes
The four key parameters
1. Convexity (Shape of the Bowl)
- Bowl (convex function): only one lowest point, gradient descent guarantees finding it
- Potato chip (non-convex function): multiple dips, may get stuck in a local minimum
- For a well-trained model, its energy function resembles a bowl; data diversity determines the bowl's depth
2. Strong Convexity Coefficient
- Shallow bowl (small
): gentle slope, slow convergence - Deep bowl (large
): steep slope, fast convergence - Physical meaning: training data diversity -> large
-> model easily learns clear patterns
3. Smoothness Constant
- Smooth terrain (small
): slope changes little, can take large steps - Rugged terrain (large
): slope changes drastically, must take small steps - Physical meaning: model architecture smoothness -> small
-> stable reasoning
4. Step Size
- Too large: may skip past the correct path
- Too small: dawdling thought, slow convergence
- Just right:
(the downhill safety formula)
5. Contraction Coefficient
large (steep bowl) -> small -> fast convergence large (rugged) -> large -> slow convergence just right -> minimal -> optimal convergence
Analogy: Learning to Ride a Bicycle
- Convexity: destination is clear (going home)
: the attractive force of home (distance and gravity) : road surface smoothness : pedaling force each time : arrival speed
Concrete Manifestation in AI Reasoning
- Data quality ->
: diverse data creates a "deep bowl" - Model architecture ->
: smooth design creates "gentle terrain" - Reasoning design ->
: appropriate step size balances exploration and exploitation - Synergy of the three ->
: determines the length of the effective reasoning window
Good system: large
Poor system: small
This is why different models and different tasks have different "effective reasoning windows" — their combinations of
The Yonglin Limit is not a mysterious phenomenon; it is the inevitable consequence of convex optimization in belief space.
Afterword: Pallas's Cat Descends the Mountain
Reasoning is like climbing a mountain; truth is at the summit. But the mountain has gravity; training is like building the road.
A Short Story: Professor Pallas's Cat's Reasoning Expedition
Let me take you on a climb up "Truth Mountain," using this metaphor to explain the core concepts of the Yonglin Formula.
Act One: Choosing the Terrain
At the foot of the mountain, there are three paths:
- Deep Bowl Road (large
): steep but direct - Shallow Saucer Road (small
): gentle but circuitous - Potato Chip Road (non-convex): multiple dips, easy to get lost
We will choose the Deep Bowl Road, because data diversity creates a steep bowl — this is the best reasoning terrain.
Act Two: Inspecting the Road Surface
The Deep Bowl Road has two variants:
- Smooth road (small
): slope changes uniformly - Rugged road (large
): suddenly steep, suddenly gentle, easy to stumble
Fortunately, our model architecture is smooth;
Act Three: Deciding the Stride
Here we need the "downhill safety formula":
When
Act Four: The Contraction Coefficient
With each step, the distance to the summit is multiplied by
- If
: after 10 steps, the distance remaining is - If
: after 10 steps, the distance remaining is
When the combination of
Act Five: Yonglin's Observation
But here is the critical problem — no matter how we walk, we will eventually return to the training camp, not the summit of Truth.
This is because the training data has brought us here; this is the prior anchor
The stable point of gradient descent:
The fixed point of the reasoning operator:
Act Six: The Effective Reasoning Window
Starting from the initial belief
This is the effective reasoning window; within
Act Seven: Meta-Level Rupture
You might think: "Since we know we'll return to camp, why not just verify the direction directly?"
But the problem is: the mechanism that produces reasoning (gradient descent) and the mechanism that verifies reasoning (judging right from wrong) are ruptured.
Between the object level and the meta level, there is a chasm.
The Moral of the Story
- Terrain is built by data (
): diverse data -> deep bowl -> good reasoning - Road is paved by architecture (
): smooth design -> easy to walk -> stable reasoning - Stride must be moderate (
): too large you stumble, too small you dawdle - Gravity always exists (
): training bias is the inevitable destination - Window has a limit (
): explore as much as possible before gravity pulls you back - Verification requires another path (meta-level rupture): the reasoner cannot self-verify
Returning to the Yonglin Formula
: the belief at step : the training camp (prior anchor) : the summit of Truth (true answer)
Unless:
- Remake the terrain (change the training data so that
approaches ) - Break the gravity (design a non-contractive reasoning operator)
- Build a meta-bridge (connect the object level and the meta level)
But at least now, we understand the mountain's structure, know the source of gravity, and have calculated the length of the window.
Reasoning democratization is about handing this map of the mountain to every climber.
On the way down the mountain, I want to say to you:
"We may never reach the summit of Truth, but at least we know why, know how far we can go, and know how the mountain was built."
"Next time, we can build a better mountain, pave a smoother road, and design smarter climbing poles."
"This is progress."
The map of the Reasoning Kingdom is still being drawn. In the next chapter, we will see how all these boundaries piece together into a complete map — the limitations and possibilities of reasoning, outlined clearly for the first time.
The mountain is tall, but people are the peak; the road is long, but feet measure it.
Though we cannot reach the summit, the heart has already recognized the mountain's shape.
Can implicit reasoning be fully explained? We know that state evolution exists in hidden layers, and that CoT can externalize part of the internal monologue, but the matter of "how states become reasoning" has still not been fully formalized. How far can this "how" go?
Where is the limit of CoT? Can the effective reasoning window be extended? Is there some architecture that can break the convergence of the Yonglin Formula?
Can meta-level rupture be repaired? If we explicitly train models to perform meta-level verification, can we avoid converging back to the prior?
Is the prior anchor fixed? Different training data produce different prior anchors. Can we, through carefully designing the training distribution, make the prior anchor closer to the true distribution?
Is human reasoning also constrained by the Yonglin Formula? Does our reasoning also converge back to some kind of "cognitive prior"? If so, how do we overcome it?
Further Reading
[Zixi Li, 2025b] — The Yonglin Formula, theoretical proof of reasoning incompleteness, rupture between object level and meta level
Wei et al. (2022). Chain-of-Thought Prompting Elicits Reasoning in Large Language Models — Foundational work on CoT
-> [arXiv:2201.11903]Olsson et al. (2022). In-context Learning and Induction Heads — Discovery of induction heads, the working memory mechanism of hidden layers
[Hu et al., 2024] — Understanding CoT reasoning from a Hopfield perspective
-> [arXiv:2410.03595][Chen et al., 2025] — Survey of long chain-of-thought reasoning, deep reasoning and inference-time scaling
-> [arXiv:2503.09567]Elhage et al. (2021). A Mathematical Framework for Transformer Circuits — Mathematical analysis of Transformer internal mechanisms
Geva et al. (2022). Transformer Feed-Forward Layers Are Key-Value Memories — Explanation of FFN layers as knowledge storage